








Nao
Einleitung
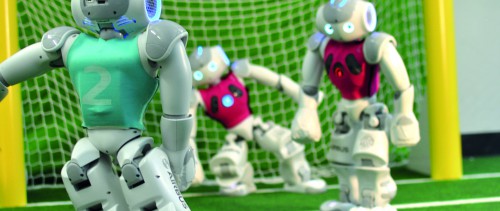
Der Nao ist ein humanoider Roboter, der von der französischen Firma Aldebaran Robotics entwickelt wurde. Seit 2007 wird er in der Standard Platform League (SPL) des RoboCup eingesetzt. Beim RoboCup treten verschiedene Roboterteams zum Fußballspielen in verschiedenen Klassen gegeneinander an. Neben fahrenden Robotern, welche den original FIFA-Ball zum Spielen benutzen, gibt es auch humanoide Wettkampfklassen verschiedener Größen, bei denen die Teams meist mit eigenständig entwickelten Robotern gegeneinander antreten. Im Gegensatz hierzu kommen in der SPL Roboter zum Einsatz, die kommerziell zu erwerben sind und deren Hardware nicht verändert werden darf. Vor 2007 wurde der von Sony entwickelte vierbeinige Roboter AIBO in der SPL eingesetzt, bevor dieser vom Nao abgelöst wurde. Die Naos der Koordinierungsstelle sollen zum einen zu Lehrzwecken eingesetzt werden, aber auch als Grundlage zur Entwicklung eines RoboCup-Teams dienen.
Technik
Aldebaran Robotics stellt verschiedene Versionen des Naos mit unterschiedlicher Anzahl an Freiheitsgraden zur Verfügung. Die für akademische Zwecke entwickelte Version verfügt im Gegensatz zur RobCup-Version über motorisierte Hände, wodurch sich Gegenstände greifen lassen. Der von uns eingesetzte Nao V3.3 verfügt über 25 Freiheitsgrade, wovon zwei im Kopf, je sechs in den Armen, fünf im Hüftgelenk und je drei in den Beinen untergebracht sind. Zur Wahrnehmung seiner Umgebung ist der Nao mit einer Vielzahl von Sensoren ausgestattet.
So befinden sich am Kopf sowie an den Händen je drei Berührungssensoren , welche selbst ein sanftes Streicheln wahrnehmen können. Einfache Tastsensoren befinden sich an der Fußvorderkante, wodurch auf dem Boden befindliche Hindernisse erkannt werden können. Höhere Hindernisse sind allerdings auch durch Ultraschall erfassbar. Hierzu sind im Torso des Naos vier Ultraschallsensoren untergebracht. Zwei im Kopf befindliche Kameras mit einer Auflösung von 640x480 Pixeln bei einer Bildfrequenz von 30 fps erlauben es, durch geeignete Bildverarbeitungssoftware Gegenstände sowie Gesichter zu erkennen. Ist ein Gesicht erkannt, so kann der Nao über seine beiden Lautsprecher eine Begrüßung äußern. Vier im Kopf befindliche Mikrophone erlauben nicht nur Geräusche wahrzunehmen, sondern ebenfalls eine Richtungserkennung durchzuführen. Außerdem verfügt der Nao über je vier Drucksensoren pro Fuß, mit denen zum einen erkannt werden kann, ob ein Kontakt zum Boden besteht, aber auch wie stark und wo genau der Fuß belastet wird. Dies ist vor allem für die Stabilität des Naos wichtig. Hierfür ist zudem eine Trägheitsnavigationssystem (engl. IMU) im Torso untergebracht, welches über einen dreiachsigen Beschleunigungssensor und ein zweiachsiges Gyroskop verfügt. In den Augen des Naos befinden sich neben Infrarotsendern und -empfängern auch Farbwechsel-LEDs. Weitere LEDs sind an den Ohren, den Füßen und an der Brust untergebracht.
Zusammen mit der Batterie, die bei voller Ladung ca. 90 min durchhält, wiegt der Nao ca. 5 kg bei einer Größe von 58 cm.
Das Herzstück des Naos sitzt im Kopf. Es ist ein AMD Geode mit 500 MHz. Als Speicher stehen 256 MB SDRAM sowie 2 GB Flashspeicher zur Verfügung. Ein 32-Bit Embedded Linux läuft als Betriebssystem auf dem Nao. Programmierbar ist der Roboter in C, C++, Python und Urbi. Für den schnellen Einstieg stellt Aldebaran Robotics jedoch auch eine grafische Entwicklungsumgebung namens Choregraphe zur Verfügung. Verbindung zum PC kann über Ethernet oder WiFi hergestellt werden.
Die Umfangreiche Ausstattung macht den Nao für einen einfachen Einstieg in die Programmierung humanoider Roboter sehr geeignet. Entstanden in der Koordinierungsstelle ist die Arbeit mit den Naos im Rahmen des RoboCup über die Jahre gewachsen. Heute haben sich die jungen Tüftler von der Koordinierungsstelle abgegliedert und eine eigenständige Vereinigung ins Leben gerufen - die HULKs.