







Quadrokopter
Einleitung
Das Prinzip des Quadrokopters ähnelt dem des Hubschraubers und ist bereits seit 1922 bekannt. Der größte Unterschied zum Hubschrauber ist, dass beim Quadrokopter vier anstatt ein oder zwei Rotoren zum Erzeugen des Auftriebs genutzt werden. Mittlerweile erfreut sich dieses Prinzip großer Beliebtheit sowohl in der Forschung als auch in der technischen Anwendung, zum Beispiel bei Überwachungsaufgaben. Einige kommerzielle Quadrokopter sind bereits erhältlich. Das von der Koordinierungsstelle dual@TUHH ausgestellte Modell ist eine komplette Eigenentwicklung von Studierenden der TUHH, um eine kostengünstige Alternative zu schaffen. Ziel ist es, eine Experimentierplattform für Forschung und Lehre in den Bereichen Regelungstechnik, Softwareentwicklung, Bildverarbeitung und künstliche Intelligenz zu schaffen, die leicht erweiterbar ist.
Technik
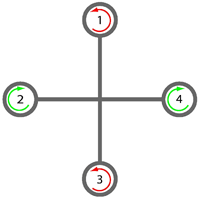
Der Quadrokopter wird durch vier Rotoren mit unterschiedlich steuerbarem Schub im Gleichgewicht gehalten. Ein einzelner Motor erzeugt ein Drehmoment zum Antrieb einer Luftschraube, wobei hierdurch ein Gegenmoment auf den Rahmen entsteht, welches ohne ein entgegen wirkendes Moment in einer Drehung um die eigene Achse resultiert. Bei einem Hubschrauber wird dem Moment des Hauptrotors mit einem Heckrotor entgegengewirkt. Das hat allerdings zur Folge, dass auf den Hubschrauber nun eine horizontale Kraft wirkt, die zu einer ständigen Driftbewegung des Hubschraubers führt. Beim Quadrokopter tritt dieses Problem nicht auf, da hier die Motoren paarweise gegenläufig drehen, was dazu führt, dass sich die einzelnen Drehmomente aufheben und somit kein resultierendes Moment auf den Quadrokopter entsteht. Das soll in der schematischen Darstellung des Quadrokopters verdeutlicht werden. Dabei zeigen die Pfeile die Drehrichtung der Rotoren an.
Die Steuerung des Quadrokopters erfolgt durch Veränderung der Drehzahlen der einzelnen Motoren. Dies hat den Vorteil, dass keine aufwändigen mechanischen Steuerelemente wie zum Beispiel Taumelscheiben benötigt werden. Ein Steigen bzw. Sinken des Quadrokopters wird dadurch realisiert, dass die Drehzahlen aller vier Motoren im gleichen Maße erhöht oder verringert werden. Soll sich der Quadrokopter nach links bewegen, muss die Drehzahl von Motor zwei verringert und die Drehzahl von Motor vier erhöht werden. Das hat zur Folge, dass links weniger Schub erzeugt wird als rechts und sich der Quadrokopter nach links neigt. Dadurch erhält die Gesamtschubrichtung eine Komponente, die nach rechts gerichtet ist (und so eine Bewegung nach links einleitet). Allgemein wird eine Richtungsänderung in der Horizontalen durch eine Veränderung des Schubverhältnisses zwischen zwei sich gegenüberliegenden Rotoren hervorgerufen. Eine Drehung um die Hochachse wird erzeugt indem der Schub von zwei gleich drehenden Motoren reduziert oder erhöht wird. Das Schubverhältnis der beiden (gegenüber liegenden) Motoren bleibt dabei gleich. Die einzelnen Momente der links- und rechtsdrehenden Rotoren heben sich aber nicht mehr auf und es kommt zu einer Drehung um die Hochachse. Durch eine Mischung all dieser Steuerbefehle kann jeder Schubvektor im Raum erreicht werden.
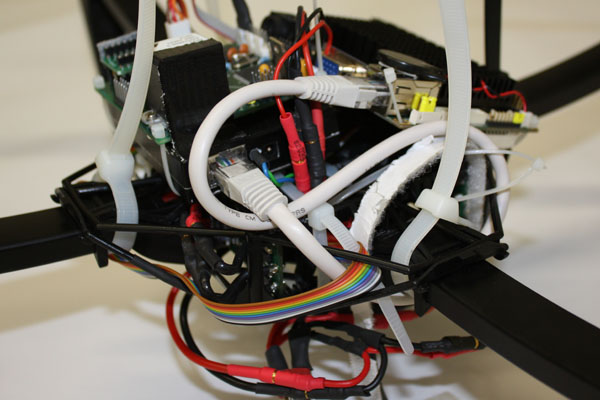
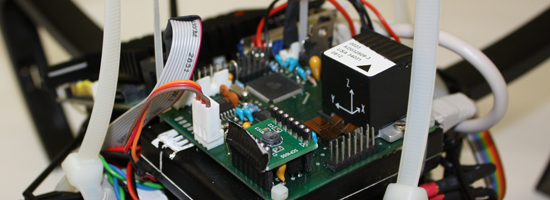
Der Bordrechner ist ein x86 Rechner in einem Format, welches in der Industrie zum Einsatz kommt. Dieser übernimmt das Abfragen des höchst genauen Lagesensors, welcher drei Beschleunigungssensoren und drei Gyroskope vereint und Winkel- sowie Beschleunigungsinformationen liefert. Auf seinem 500 Mhz Prozessor errechnet er daraus 50 Mal in der Sekunde die Ansteuerungen der einzelnen vier Motoren. Die Motoren sind effiziente Brushlessmotoren aus dem Modellbau. Jeder der Motoren kann mit den verwendeten Luftschrauben einen Schub von maximal 660 g entwickeln - bei einer Leistungsaufnahme von maximal 110 Watt. Die Umsetzung der Computerbefehle auf den von den Motoren benötigten Drehstrom übernehmen vier kleine Regler. Die Kommunikation des Bordrechners mit externen Rechnern erfolgt über einen hoch integrierten WLAN Accesspoint.
Auf dem Bordrechner des Quadrokopters läuft eine frei verfügbare Linux Distribution. Um den zeitkritischen Aufgaben der Regelung der Fluglage gerecht zu werden, ist eine Echtzeiterweiterung integriert. Diese ermöglicht ein mikrosekundengenaues Timing der Steuerungsbefehle. Der restliche Teil der Software ist modular und weitestgehend betriebssystemunabhängig in C++ geschrieben. Die Gliederung in Module ermöglicht ein leichtes Experimentieren mit verschiedenen Regelalgorithmen oder das Austauschen einzelner Hardwarekomponenten mit geringem Aufwand. Somit ist dieses System ideal für Forschung und Entwicklung.
Zurzeit wird ein ganzer Schwarm dieser Fluggeräte an der TUHH gebaut, welcher zum Beispiel kooperativ die Aufklärung in Katastrophengebieten erleichtern könnte.