








Senior Robotik-Camp im Frühjahr 2025 an der TU Hamburg
Am 21. und 22 Juni fand an der TU Hamburg erneut das Senior Robotik-Camp statt. Dieses Mal gab es zwei Kurse: zum einen „Konstruktion und Druck von 3D-Modellen“ und zum anderen „Objektorientierte Programmierung mit LEGO Mindstorms“. Bei dem ersten Kurs handelt es sich um das selbstständige Konstruieren von 3D-Modellen, welche danach auf 3D-Druckern ausgedruckt wurden. Bei dem zweiten Kurs handelt es sich um das Programmieren von Lego-Robotern mit der textbasierten Programmiersprache Java. Am Samstag und Sonntag gab es jeweils eine große Mittagspause mit warmen Essen. An dem erste Tag des Camps gab es nach dem Mittag noch einen kleinen Spaziergang, der am zweiten Tag aufgrund der Temperaturen ausgefallen ist.
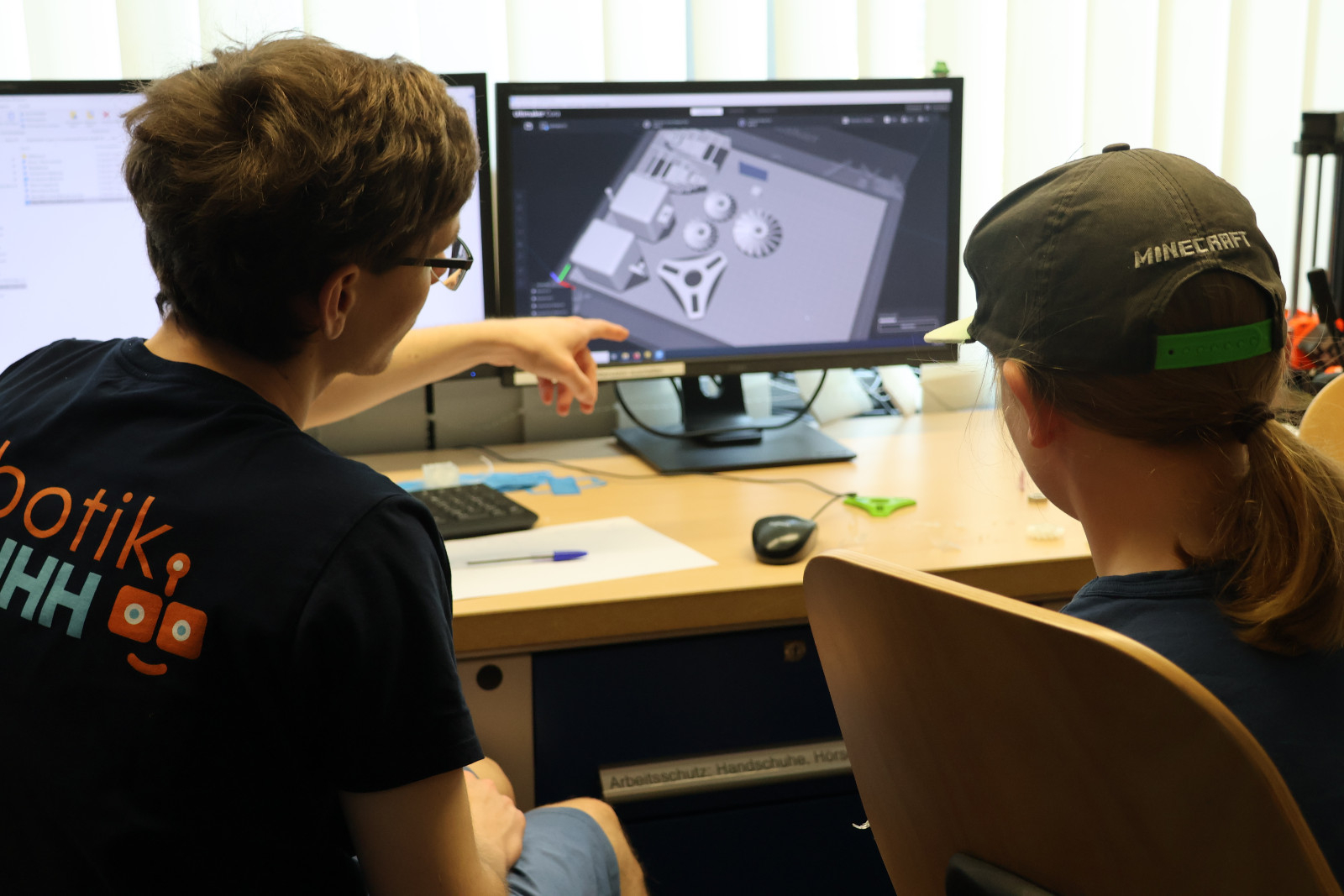
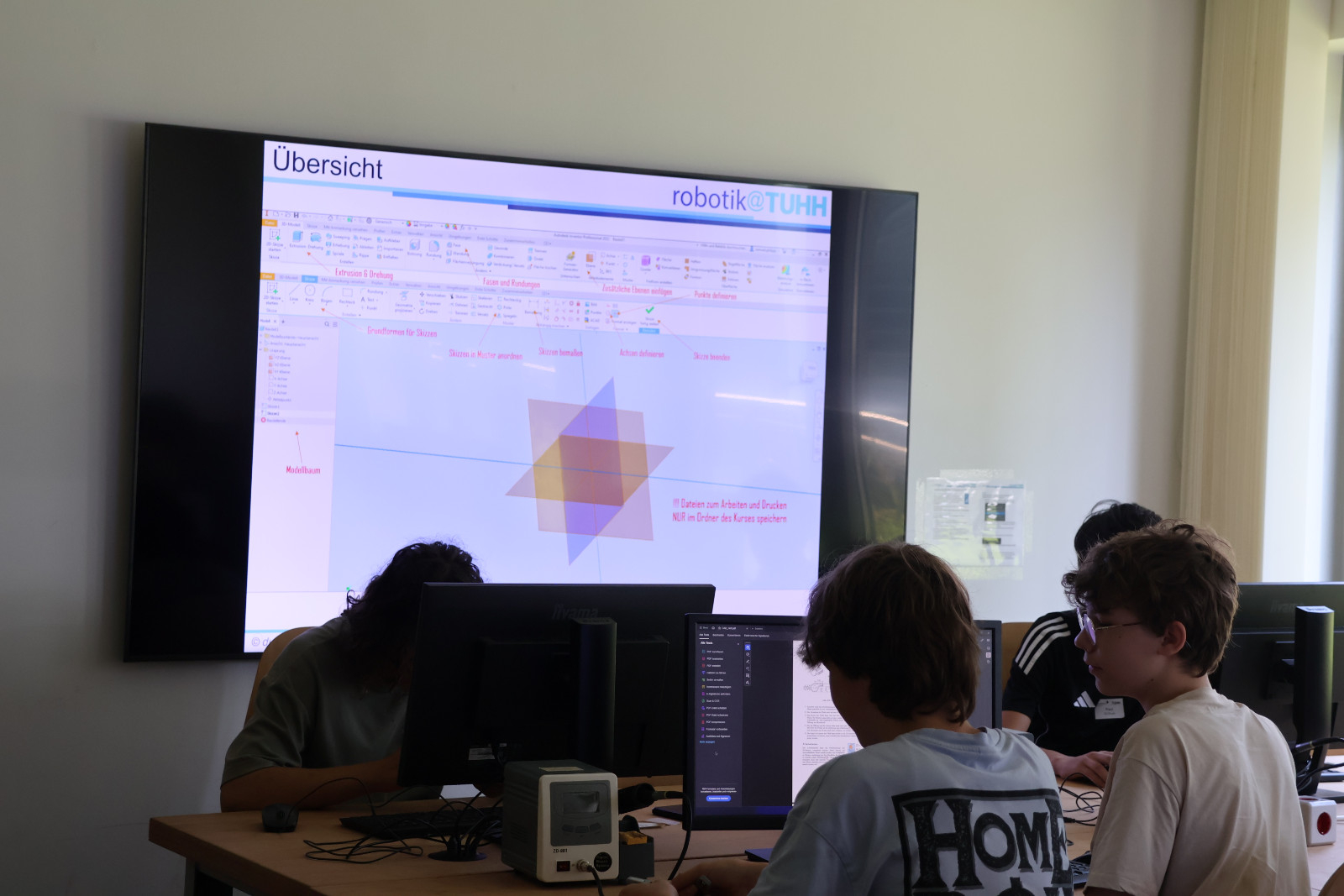
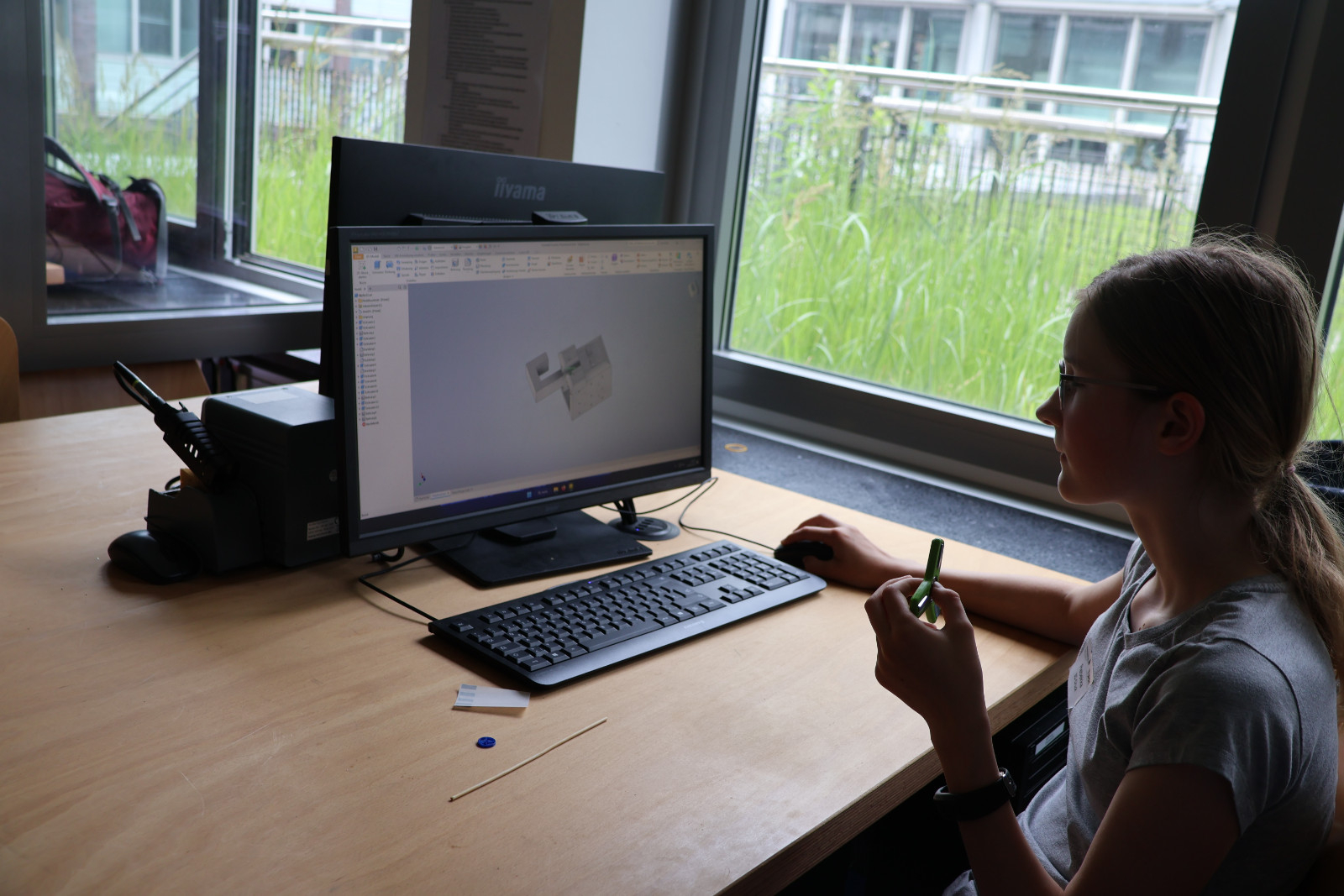
Konstruktion und Druck von 3D-Modellen
In diesem Kurs wurden zur Einführung in das Programm Fidgetspinner konstruiert und gedruckt, die mit Gewichten und einem Kugellager auch gut funktioniert haben. Danach haben sich die Schüler in ihre eigenen Projekte gestürzt. Die Schüler konstruierten von Minecraftfiguren über ein Schachspiel, sowie ein Unendlichkeitsgetriebe bis hin zu dem Tubinenaufbau eines Flugzeuges viele unterschiedliche Objekte.

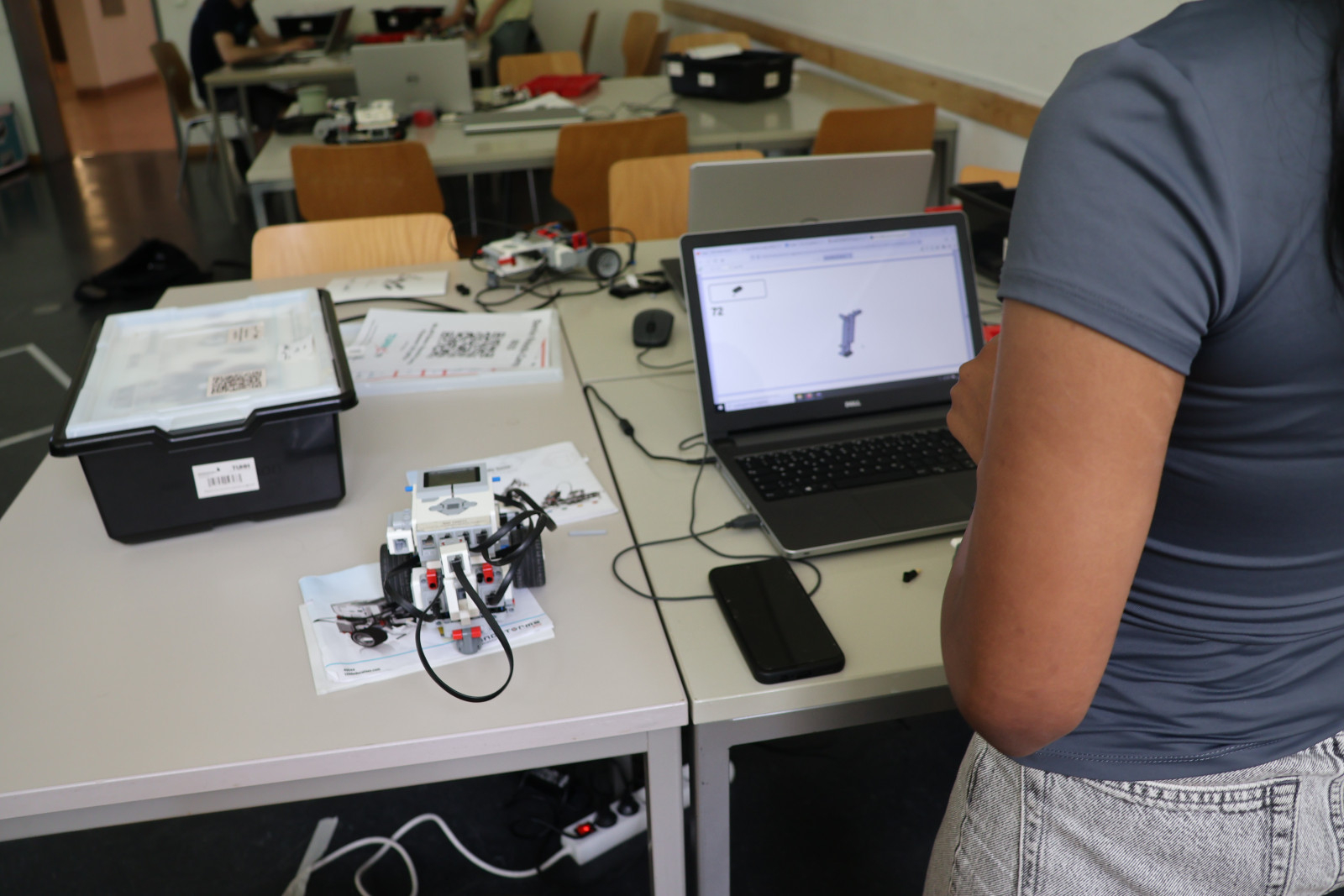
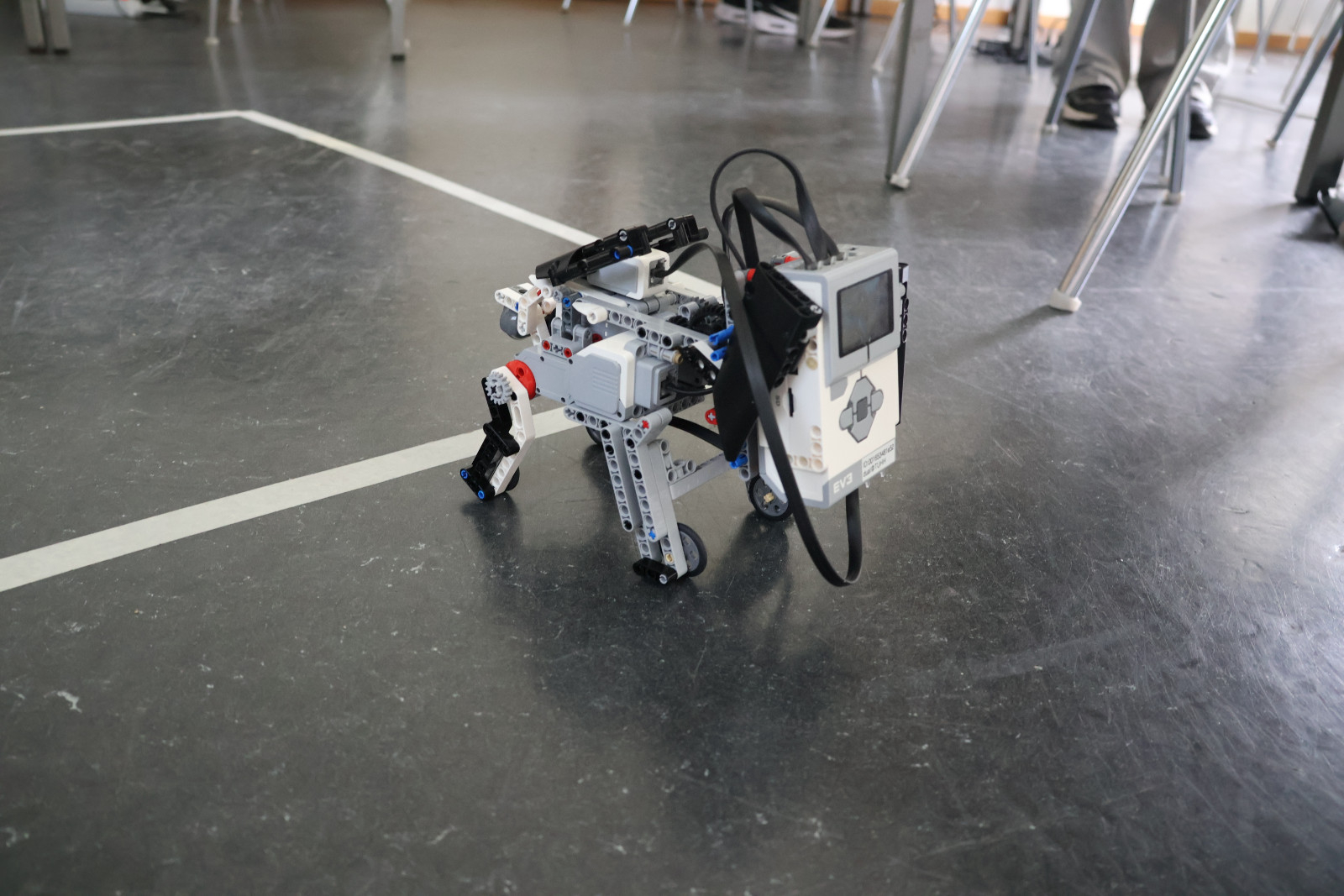
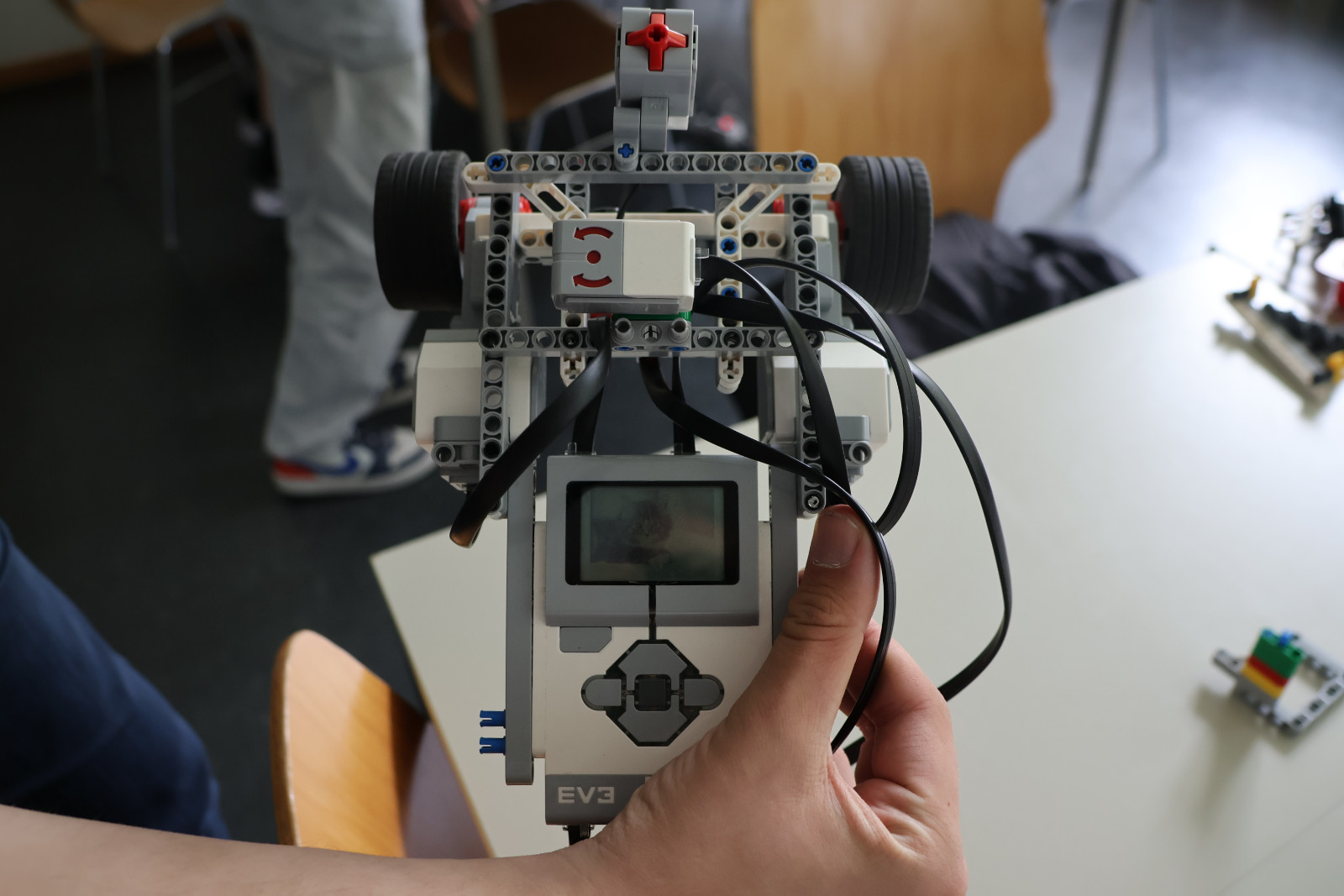





Objektorientierte Programmierung mit LEGO Mindstorms
Hier haben die Schüler mit Lego EV3-Robotern gearbeitet und diese mit Java programmiert. Gebaut wurden von ihnen zum Beispiel ein Hund, der sich, wenn man ihn streichelt, hinsetzt oder ein Tamagotchi ähnlicher Roboter, der als Spielzeug gedacht ist. Es wurden auch viele Gefährte gebaut. Wer wollte, konnte am Ende noch an einem kleinen Roboter Sumo-Ringen teilnehmen, bei dem die Roboter versuchen, den anderen Roboter aus einem Kreis auf dem Boden zu schieben. Mithilfe der verschiedenen Sensoren (z. B. Ultraschall- oder Tastsensoren) konnten diese unterschiedlichen Aufgaben bewältigt werden.