














Robotik-Kurs bei der JuniorAkademie in Papenburg vom 16.-23. Oktober 2015









Zum dritten Mal war das Team der Koordinierungsstelle dual@TUHH ein Teil der NORDMETALL-Akademie Papenburg für Schülerinnen und Schüler der Klassen 8 bis 10 aus Niedersachsen. Innerhalb von einer Woche haben sich die Mädchen und Jungen des Kurses Robotik und 3D-Druck mit dem Thema „Das Robo-Maus Labyrinth“ auseinander gesetzt.
Als erstes lernten die Jugendlichen die CAD-Software kennen. Um ein 3D-Objekt zu erzeugen wird zunächst eine 2D-Skizze erstellt und anschließend mit verschiedenen Werkzeugen zu dreidimensionalen Objekten umgerechnet. Nach dieser Einführung wurden verschiedene Projekte erarbeitet. Zunächst sollte jeder einen Würfel designen, welcher auf der Vorderseite den ersten Buchstaben des Vornamens enthalten sollte. Das nächste Projekt erforderte besonders Zusammenarbeit: Die Teilnehmenden sollten gemeinsam eine Murmelbahn konstruieren und mit dem 3D-Drucker drucken. Die Teilstücke wurden in Zweiergruppen entwickelt und zum Schluss zusammengesetzt. Hierbei musste besonders an der Schnittstellen eine Absprache zwischen den Teams erfolgen. Nach dem Zusammensetzen rollte die Murmel perfekt durch das Labyrinth.

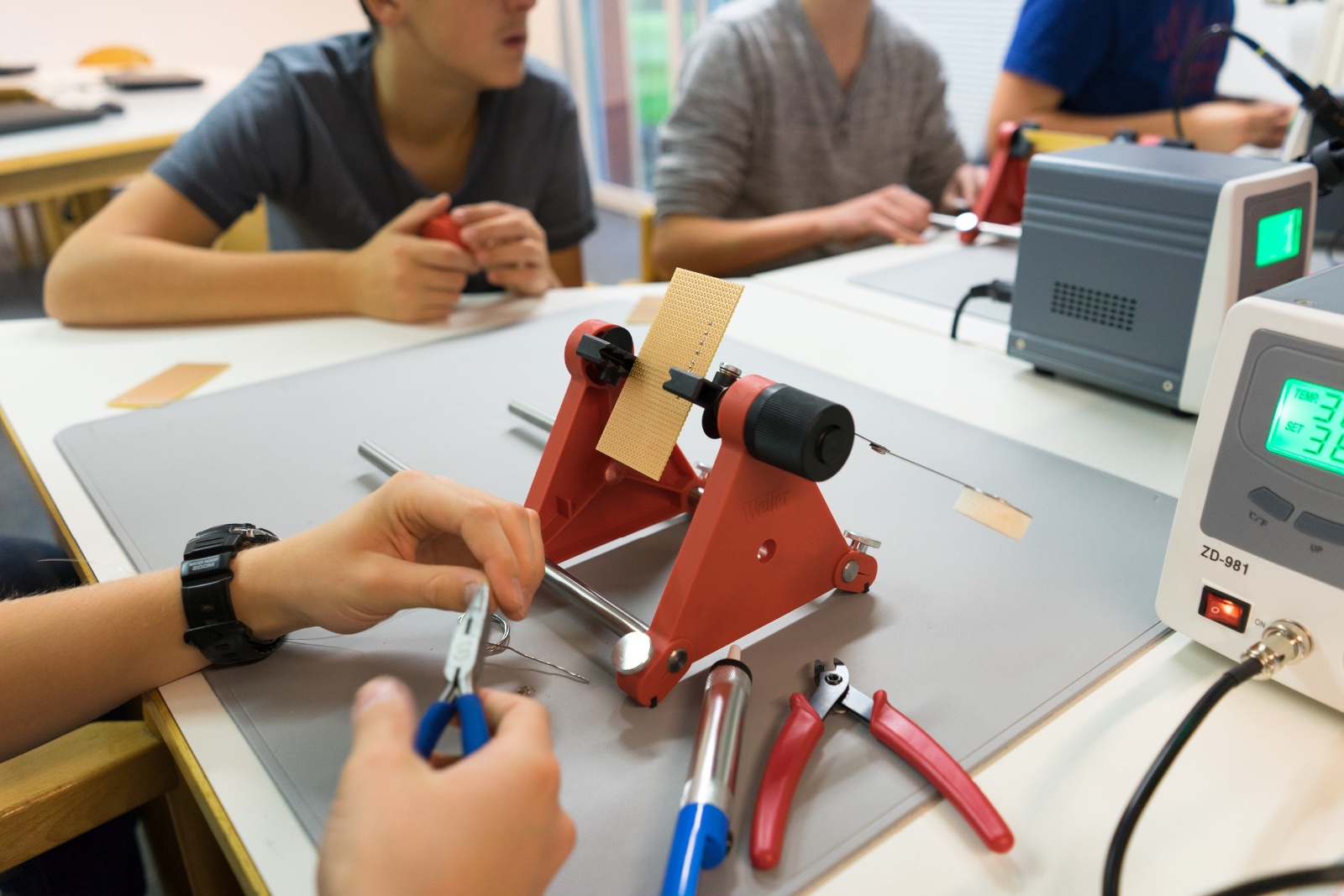
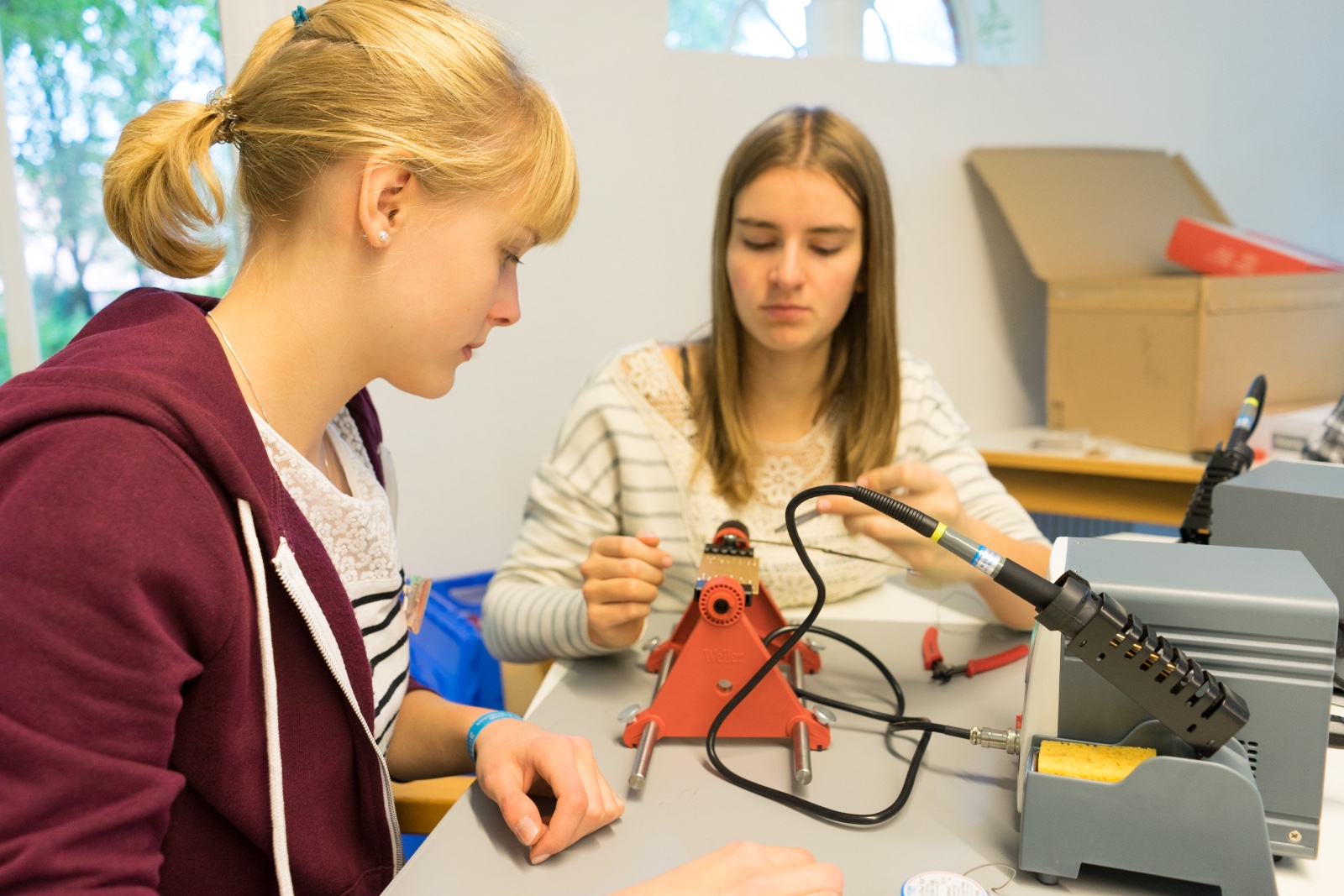
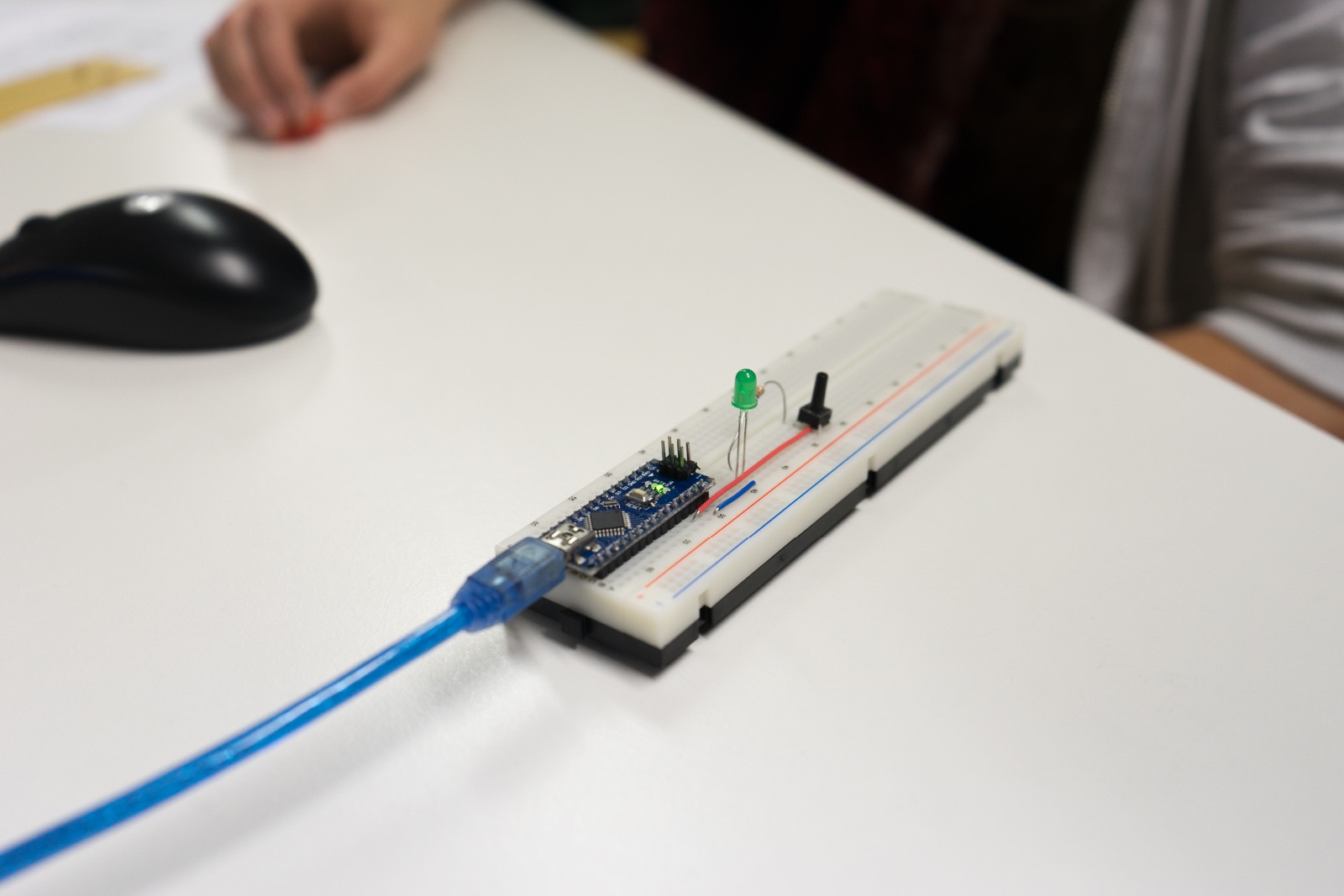
Neben dem 3D-Druck stand als zentrales Element im Mittelpunkt des Kurses das Löten von eigenen Schaltungen und die Ansteuerung sowie Programmierung eines Ardunios. Dazu gab es zu Beginn des Kurses mehrere Lötübungen und eine Einführung in die unterschiedlichen elektrischen Bauelemente wie z.B. Widerstände, Transistoren oder Dioden. Nachdem die ersten eigenen Schaltungen zum Leben erweckt wurden, konnten die Teilnehmenden den Ardunio in die Schaltung einbinden. Dazu gab es eine Einführung in die Programmiersprache C.
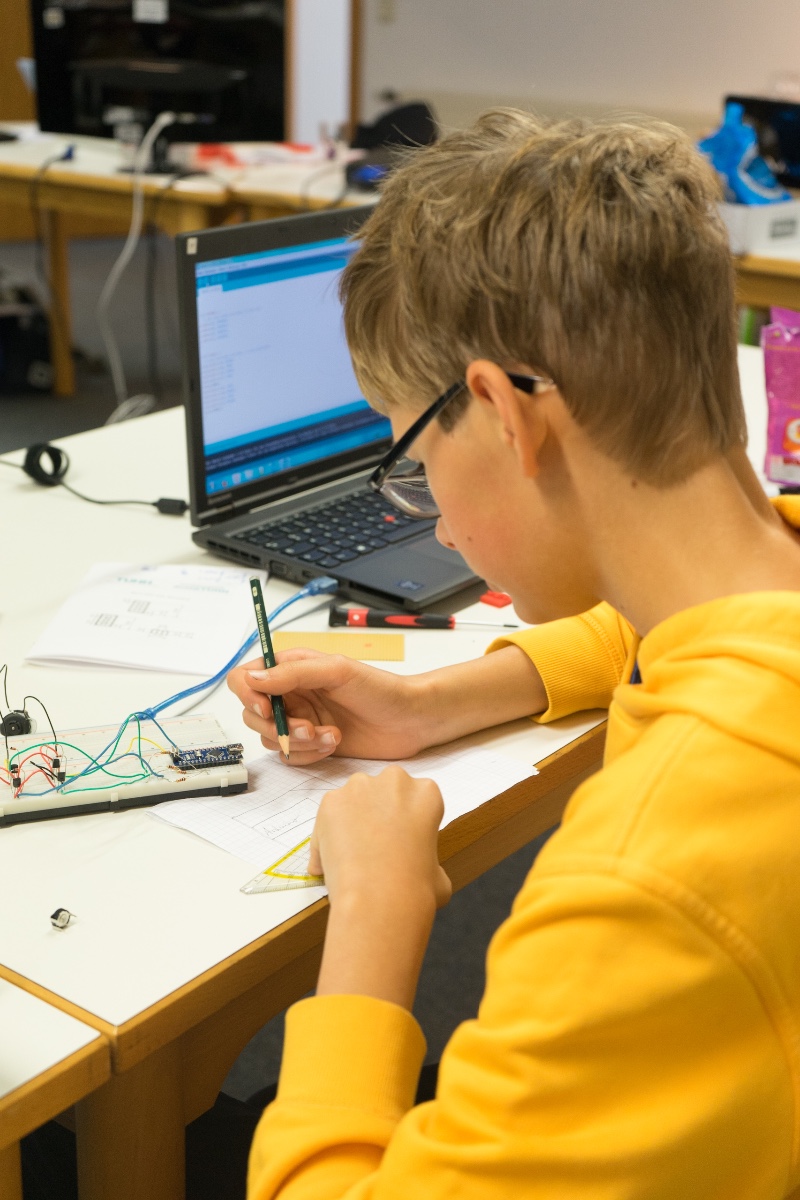
Das eigentliche Hauptprojekt war die Konstruktion und Programmierung einer Robo-Maus, die alleine durch einen Parcous fahren sollte. Dafür wurden die Teilnehmenden in Zweiergruppen aufgeteilt. Jede Gruppe konstruierte mit Autocad Inventor eine eigene Robo-Maus. Dabei bestand jede Maus aus vielen einzelnen Teilen, welche auf den 3D-Druckern direkt vor Ort ausgedruckt werden konnten. Das Innenleben der Mäuse mussten die jungen Ingenieure selbst entwickeln: auf kleinen Lochrasterplatinen wurden die Schaltungen gelötet und durch weitere Sensoren erhielten die Robo-Mäuse die Möglichkeit ihre Umwelt wahrzunehmen. Nachdem die Schaltungen und die Ardunios in der 3D-Konstruktion platziert wurden, konnte das C-Programm für jede Maus geschrieben werden. Dabei wurden die Motoren der Robo-Mäuse angesteuert, auf die Informationen der Sensoren geachtet und eine künstliche Intelligenz programmiert. Am Ende wurden die Robo-Mäuse mit Batterien zum Leben erweckt und konnte ihre neue Heimat im Kursraum erkunden.