














micro:bit

Technik
Der micro:bit bietet einen 32-Bit-Mikrocontroller vom Typ ARM Cortex 10 mit 16 MHz Taktfrequenz, 256 KByte Flash-Speicher und 16 KByte SRAM. Neben einer USB-Schnittstelle steht außerdem ein Funkchip zur Verfügung, mit dem sowohl zur "Außenwelt", aber auch zwischen den Mikrocontrollern kommuniziert werden kann. Außerdem ist bietet er eine 5x5 rote LED Matrix, zwei Knöpfe, einem Magnetometer und einen Beschleunigungssensor.
Mithilfe der Pins am unteren Ende des micro:bits können Erweiterungen angeschlossen werden. Ein Bausatz um aus dem micro:bit einen fahrbaren Roboter zu machen ist der Bit:Bot. Dieser besitzt zwei Motoren, zwölf RGB LEDs, zwei Lichtsensoren, sowie zwei Linienverfolgungssensoren. Ein I2C Connector macht es möglich, auch noch andere Sensoren zu ergänzen. Ein Lautsprecher ermöglicht außerdem die akustische Ausgabe von Signalen.
Ausstattung
In der Kursbox für einen Kurs mit dem micro:bit sind folgende Bestandteile enthalten:
- ein Klassensatz micro:bits
- ein Klassensatz Bit:Bots
- ein Klassensatz mit notwendigen USB-Kabeln und Batterien
Programmierung
Der micro:bit kann mit MicroPython programmiert werden. Neben einer Web-Anwendung mit blockbasierter Programmierung steht auch mit dem mu-editor eine Desktop Version zur Verfügung, mit der der MicroPython code direkt compiliert und auf den micro:bit geladen werden kann
3D-Druck

Einleitung
Ein 3D-Drucker produziert mit Hilfe eines Computermodells ein dreidimensionales Werkstück nach vorgegebenen Maßen und Formen (CAD). Die 3D-Modelle werden mit Autodesk Inventor erstellt. Das Werkstück wird aus einem oder mehreren flüssigen oder festen Werkstoffen schichtweise aufgetragen. Häufig verwendete Werkstoffe sind Kunststoffe und Kunstharze. Aber auch die Herstellung mit Keramiken und Metallen ist mittlerweile möglich wenn auch noch vergleichbar kostspielig.
3D-Drucker werden in der Industrie vor allem zur Herstellung von Prototypen und Modellen eingesetzt, aber auch für die Fertigung von Werkstücken mit geringen Stückzahlen.Beim 3D-Drucken muss - im Gegensatz zu anderen Fertigungsverfahren - keine aufwendige Form hergestellt werden. Ein weiterer Vorteil ist der geringe Materialverlust. Außerdem ist diese Fertigungsmethode ist sehr energiesparend, weil das Material nur einmal in der benötigten Größe und Masse aufgetragen wird.
Fertigungsverfahren
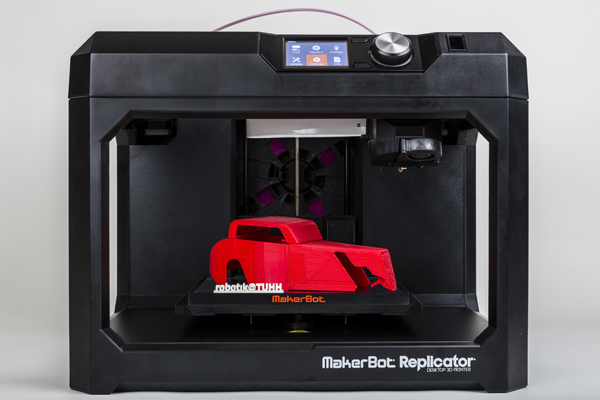 Das Drucken erfolgt mit dem Fertigungsverfahren Fused Deposition Modelling (Schmelzschichtung): Der drahtförmige Kunststoff wird durch das Zuführen von Wärme flüssig. Anschließend wird es unter Druck mit Hilfe einer Düse aufgebracht. Der Werkstoff erhärtet durch Abkühlung an der gewünschten Position. So entsteht, ähnlich wie bei einem normalen Drucker, ein Raster von Punkten auf einer Fläche.
Das Drucken erfolgt mit dem Fertigungsverfahren Fused Deposition Modelling (Schmelzschichtung): Der drahtförmige Kunststoff wird durch das Zuführen von Wärme flüssig. Anschließend wird es unter Druck mit Hilfe einer Düse aufgebracht. Der Werkstoff erhärtet durch Abkühlung an der gewünschten Position. So entsteht, ähnlich wie bei einem normalen Drucker, ein Raster von Punkten auf einer Fläche.
Die 3D-Form wird schichtweise aufgetragen, das bedeutet es wird zeilenweise eine Arbeitsebene abgefahren und dann die Arbeitsebene „stapelnd“ nach oben verschoben. Die Schichtdicken liegen je nach Modell zwischen 0,025 und 1,25 mm. Es können sowohl Vollkörper als auch Hohlkörper gefertigt werden. Die herstellbaren Wandstärken bei einem Hohlkörper sind jedoch verfahrensbedingt, je nach 3D-Drucker, beschränkt - z.B. auf mindestens 0,2 mm.
Ausstattung
- Filament (Kunststoff)
- Tape
- Schneidezangen
Hinweis: Die Materialien werden von der TUHH gestellt.
Links
LEGO® EV3
Einleitung
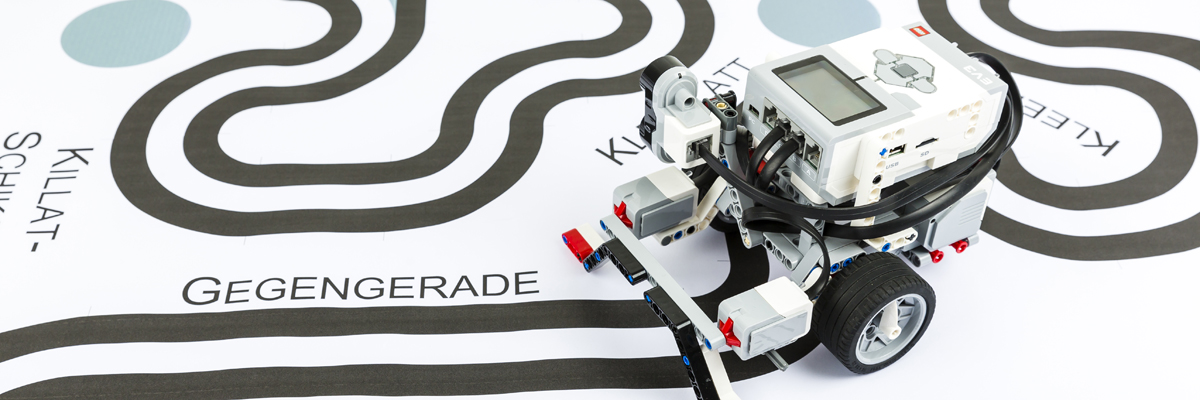
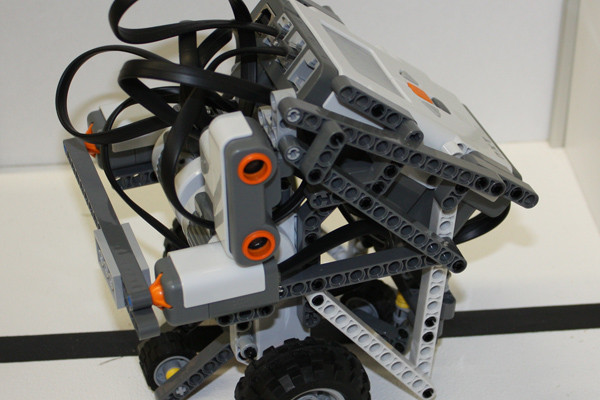
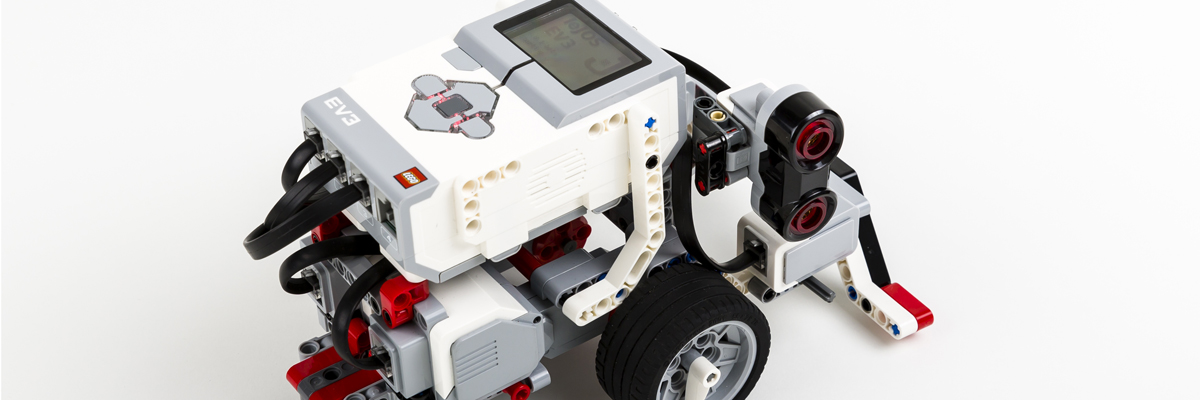
Der EV3 ist ein intelligenter, programmierbarer Baustein der Firma LEGO®. Der EV3 Baustein ist, nach RCX und NXT, die dritte Generation der Lego Roboter und ähnelt dem NXT Baustein.
Der EV3 besitzt im Gegensatz zum älteren Modell (NXT) vier Eingänge und vier Ausgänge. Der Stein ist das „Gehirn“ des Roboters, verfügt über einen leistungsstarken ARM9-32-Bit-Mikroprozessor, integrierten Programmspeicher mit 16 GB Flash-Speicher und 64 MB RAM, einen USB-Port und einen Micro-SD-Kartenslot. Die Kommunikation über USB, Bluetooth und WiFi zur Datenübertragung auf einem Computer wird unterstützt. Außerdem ist der Baustein kompatibel zu Mobilfunkgeräten (Android und iOS).
Technik
Der Mikroprozessor (ARM9) ist ein Produkt der ARM-Familie. Die ARM-CPU ist eine RISC-Architektur (Reduced Instruction Set Computing) und kennt als solche lediglich drei Kategorien von Befehlen:
- Befehle zum Zugriff auf den Speicher (Load/Store)
- arithmetische oder logische Befehle auf Werte in Registern (UND, ODER)
- Befehle zum Ändern des Programmflusses (Sprünge, Subprogrammaufrufe)
Dies ermöglicht meist ein schnelleres Reagieren auf Unterbrechungen (Interrupts) durch externe Signale. So prädestiniert sich diese Prozessorkategorie für Aufgaben mit Echtzeitanforderungen.
Der EV3 Baustein kann mit drei Servomotoren (inkl. integrierten Rotationsensoren, der die Umdrehungen des Motors misst), einem Ultraschallsensor, einem Farb-/Lichtsensor, ein Berührungssensoren und einem Mikrofon ergänzt werden.
Mit dem Ultraschallsensor kann der Roboter Entfernungen einschätzen und „sehen“, wo sich Gegenstände befinden. In Verbindung mit dem EV3 Stein kann der Ultraschallsensor Gegenstände erkennen und den Abstand in Zoll oder Zentimeter messen. Als Ultraschall bezeichnet man Schall mit Frequenzen, die oberhalb des vom Menschen wahrgenommenen Bereiches liegen, etwa zwischen 25 kHz und 1 GHz. Schall mit noch höherer Frequenz wird als Hyperschall bezeichnet, bei Frequenzen unterhalb des für Menschen hörbaren Frequenzbereichs spricht man dagegen von Infraschall. Zur Erzeugung von Ultraschall in Luft eignen sich Lautsprecher (insbesondere Piezolautsprecher), d. h. membrangekoppelte Platten aus piezoelektrischem Material, die durch Umkehr des Piezo-Effekts zu Schwingungen angeregt werden. Ultraschall in Flüssigkeiten und Festkörpern wurde früher durch Wandler erzeugt, die sich Echolote nennen. Heute verwendet man dazu Quarz- oder Keramikschwinger. An diese wird eine Wechselspannung angelegt.
Mit dem Lichtsensor kann der Roboter Lichtverhältnisse erkennen und 8 verschiedene Farben unterscheiden (siehe RCX).
Der Berührungssensor besteht aus einem Schalter, der am Ende des Bausteins verbaut ist und meistens im logischen Modus (An oder Aus) verwendet wird.








Ausstattung
Das handelsübliche EV3-Set beinhaltet (bei uns im Kurs vorhanden):
- EV3 Brick
- 550 Lego-Technik Bauteile
- Sensoren (Ultraschall-, Licht-, Berührungssensoren, Mikrofon)
- 3 Servomotoren (+ eingebauter Rotationssensor)
- USB-Kabel
- Anschlusskabel
- Erweiterungen: Infrarot-Sucher, Infrarot-Sensor, Kreisel-Sensor, Farbsensor
Programmierung
Die Programmierung des EV3 kann unter anderem in der objektorientierten Programmiersprache Java erfolgen. Dafür eignet sich zum Beispiel die Entwicklungsumgebung Eclipse. Eclipse ist ein beliebtes Open-Source Projekt, welches viele hilfreiche Werkzeuge zur Programmierung bietet (Download Eclipse). Außerdem kann mit der Software Lejos (LEGO-java-operating-system) programmiert werden (Download Lejos).
Nao
Einleitung
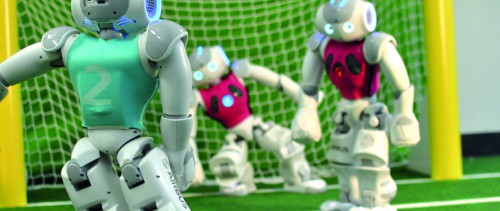
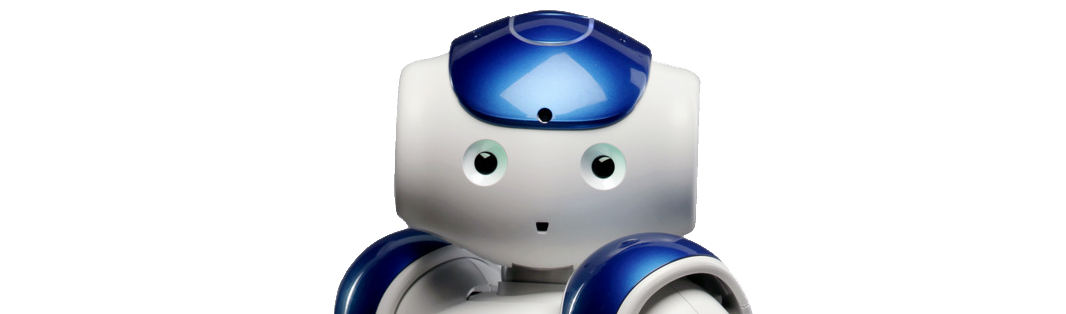
Der Nao ist ein humanoider Roboter, der von der französischen Firma Aldebaran Robotics entwickelt wurde. Seit 2007 wird er in der Standard Platform League (SPL) des RoboCup eingesetzt. Beim RoboCup treten verschiedene Roboterteams zum Fußballspielen in verschiedenen Klassen gegeneinander an. Neben fahrenden Robotern, welche den original FIFA-Ball zum Spielen benutzen, gibt es auch humanoide Wettkampfklassen verschiedener Größen, bei denen die Teams meist mit eigenständig entwickelten Robotern gegeneinander antreten. Im Gegensatz hierzu kommen in der SPL Roboter zum Einsatz, die kommerziell zu erwerben sind und deren Hardware nicht verändert werden darf. Vor 2007 wurde der von Sony entwickelte vierbeinige Roboter AIBO in der SPL eingesetzt, bevor dieser vom Nao abgelöst wurde. Die Naos der Koordinierungsstelle sollen zum einen zu Lehrzwecken eingesetzt werden, aber auch als Grundlage zur Entwicklung eines RoboCup-Teams dienen.
Technik
Aldebaran Robotics stellt verschiedene Versionen des Naos mit unterschiedlicher Anzahl an Freiheitsgraden zur Verfügung. Die für akademische Zwecke entwickelte Version verfügt im Gegensatz zur RobCup-Version über motorisierte Hände, wodurch sich Gegenstände greifen lassen. Der von uns eingesetzte Nao V3.3 verfügt über 25 Freiheitsgrade, wovon zwei im Kopf, je sechs in den Armen, fünf im Hüftgelenk und je drei in den Beinen untergebracht sind. Zur Wahrnehmung seiner Umgebung ist der Nao mit einer Vielzahl von Sensoren ausgestattet.
So befinden sich am Kopf sowie an den Händen je drei Berührungssensoren , welche selbst ein sanftes Streicheln wahrnehmen können. Einfache Tastsensoren befinden sich an der Fußvorderkante, wodurch auf dem Boden befindliche Hindernisse erkannt werden können. Höhere Hindernisse sind allerdings auch durch Ultraschall erfassbar. Hierzu sind im Torso des Naos vier Ultraschallsensoren untergebracht. Zwei im Kopf befindliche Kameras mit einer Auflösung von 640x480 Pixeln bei einer Bildfrequenz von 30 fps erlauben es, durch geeignete Bildverarbeitungssoftware Gegenstände sowie Gesichter zu erkennen. Ist ein Gesicht erkannt, so kann der Nao über seine beiden Lautsprecher eine Begrüßung äußern. Vier im Kopf befindliche Mikrophone erlauben nicht nur Geräusche wahrzunehmen, sondern ebenfalls eine Richtungserkennung durchzuführen. Außerdem verfügt der Nao über je vier Drucksensoren pro Fuß, mit denen zum einen erkannt werden kann, ob ein Kontakt zum Boden besteht, aber auch wie stark und wo genau der Fuß belastet wird. Dies ist vor allem für die Stabilität des Naos wichtig. Hierfür ist zudem eine Trägheitsnavigationssystem (engl. IMU) im Torso untergebracht, welches über einen dreiachsigen Beschleunigungssensor und ein zweiachsiges Gyroskop verfügt. In den Augen des Naos befinden sich neben Infrarotsendern und -empfängern auch Farbwechsel-LEDs. Weitere LEDs sind an den Ohren, den Füßen und an der Brust untergebracht.
Zusammen mit der Batterie, die bei voller Ladung ca. 90 min durchhält, wiegt der Nao ca. 5 kg bei einer Größe von 58 cm.
Das Herzstück des Naos sitzt im Kopf. Es ist ein AMD Geode mit 500 MHz. Als Speicher stehen 256 MB SDRAM sowie 2 GB Flashspeicher zur Verfügung. Ein 32-Bit Embedded Linux läuft als Betriebssystem auf dem Nao. Programmierbar ist der Roboter in C, C++, Python und Urbi. Für den schnellen Einstieg stellt Aldebaran Robotics jedoch auch eine grafische Entwicklungsumgebung namens Choregraphe zur Verfügung. Verbindung zum PC kann über Ethernet oder WiFi hergestellt werden.
Die Umfangreiche Ausstattung macht den Nao für einen einfachen Einstieg in die Programmierung humanoider Roboter sehr geeignet. Entstanden in der Koordinierungsstelle ist die Arbeit mit den Naos im Rahmen des RoboCup über die Jahre gewachsen. Heute haben sich die jungen Tüftler von der Koordinierungsstelle abgegliedert und eine eigenständige Vereinigung ins Leben gerufen - die HULKs.
Quadrokopter
Einleitung
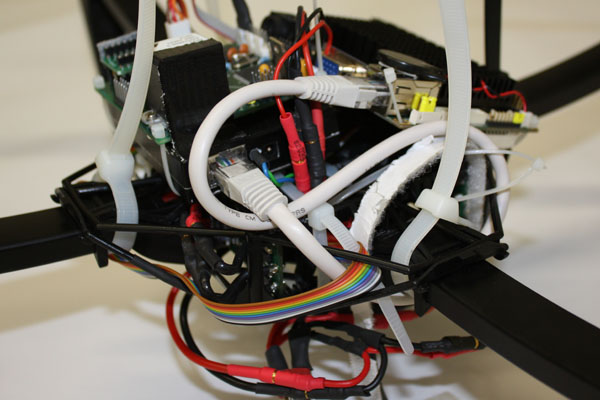
Das Prinzip des Quadrokopters ähnelt dem des Hubschraubers und ist bereits seit 1922 bekannt. Der größte Unterschied zum Hubschrauber ist, dass beim Quadrokopter vier anstatt ein oder zwei Rotoren zum Erzeugen des Auftriebs genutzt werden. Mittlerweile erfreut sich dieses Prinzip großer Beliebtheit sowohl in der Forschung als auch in der technischen Anwendung, zum Beispiel bei Überwachungsaufgaben. Einige kommerzielle Quadrokopter sind bereits erhältlich. Das von der Koordinierungsstelle dual@TUHH ausgestellte Modell ist eine komplette Eigenentwicklung von Studierenden der TUHH, um eine kostengünstige Alternative zu schaffen. Ziel ist es, eine Experimentierplattform für Forschung und Lehre in den Bereichen Regelungstechnik, Softwareentwicklung, Bildverarbeitung und künstliche Intelligenz zu schaffen, die leicht erweiterbar ist.
Technik
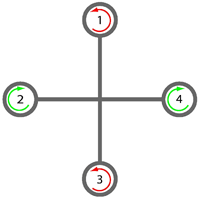
Der Quadrokopter wird durch vier Rotoren mit unterschiedlich steuerbarem Schub im Gleichgewicht gehalten. Ein einzelner Motor erzeugt ein Drehmoment zum Antrieb einer Luftschraube, wobei hierdurch ein Gegenmoment auf den Rahmen entsteht, welches ohne ein entgegen wirkendes Moment in einer Drehung um die eigene Achse resultiert. Bei einem Hubschrauber wird dem Moment des Hauptrotors mit einem Heckrotor entgegengewirkt. Das hat allerdings zur Folge, dass auf den Hubschrauber nun eine horizontale Kraft wirkt, die zu einer ständigen Driftbewegung des Hubschraubers führt. Beim Quadrokopter tritt dieses Problem nicht auf, da hier die Motoren paarweise gegenläufig drehen, was dazu führt, dass sich die einzelnen Drehmomente aufheben und somit kein resultierendes Moment auf den Quadrokopter entsteht. Das soll in der schematischen Darstellung des Quadrokopters verdeutlicht werden. Dabei zeigen die Pfeile die Drehrichtung der Rotoren an.
Die Steuerung des Quadrokopters erfolgt durch Veränderung der Drehzahlen der einzelnen Motoren. Dies hat den Vorteil, dass keine aufwändigen mechanischen Steuerelemente wie zum Beispiel Taumelscheiben benötigt werden. Ein Steigen bzw. Sinken des Quadrokopters wird dadurch realisiert, dass die Drehzahlen aller vier Motoren im gleichen Maße erhöht oder verringert werden. Soll sich der Quadrokopter nach links bewegen, muss die Drehzahl von Motor zwei verringert und die Drehzahl von Motor vier erhöht werden. Das hat zur Folge, dass links weniger Schub erzeugt wird als rechts und sich der Quadrokopter nach links neigt. Dadurch erhält die Gesamtschubrichtung eine Komponente, die nach rechts gerichtet ist (und so eine Bewegung nach links einleitet). Allgemein wird eine Richtungsänderung in der Horizontalen durch eine Veränderung des Schubverhältnisses zwischen zwei sich gegenüberliegenden Rotoren hervorgerufen. Eine Drehung um die Hochachse wird erzeugt indem der Schub von zwei gleich drehenden Motoren reduziert oder erhöht wird. Das Schubverhältnis der beiden (gegenüber liegenden) Motoren bleibt dabei gleich. Die einzelnen Momente der links- und rechtsdrehenden Rotoren heben sich aber nicht mehr auf und es kommt zu einer Drehung um die Hochachse. Durch eine Mischung all dieser Steuerbefehle kann jeder Schubvektor im Raum erreicht werden.
Der Bordrechner ist ein x86 Rechner in einem Format, welches in der Industrie zum Einsatz kommt. Dieser übernimmt das Abfragen des höchst genauen Lagesensors, welcher drei Beschleunigungssensoren und drei Gyroskope vereint und Winkel- sowie Beschleunigungsinformationen liefert. Auf seinem 500 Mhz Prozessor errechnet er daraus 50 Mal in der Sekunde die Ansteuerungen der einzelnen vier Motoren. Die Motoren sind effiziente Brushlessmotoren aus dem Modellbau. Jeder der Motoren kann mit den verwendeten Luftschrauben einen Schub von maximal 660 g entwickeln - bei einer Leistungsaufnahme von maximal 110 Watt. Die Umsetzung der Computerbefehle auf den von den Motoren benötigten Drehstrom übernehmen vier kleine Regler. Die Kommunikation des Bordrechners mit externen Rechnern erfolgt über einen hoch integrierten WLAN Accesspoint.
Auf dem Bordrechner des Quadrokopters läuft eine frei verfügbare Linux Distribution. Um den zeitkritischen Aufgaben der Regelung der Fluglage gerecht zu werden, ist eine Echtzeiterweiterung integriert. Diese ermöglicht ein mikrosekundengenaues Timing der Steuerungsbefehle. Der restliche Teil der Software ist modular und weitestgehend betriebssystemunabhängig in C++ geschrieben. Die Gliederung in Module ermöglicht ein leichtes Experimentieren mit verschiedenen Regelalgorithmen oder das Austauschen einzelner Hardwarekomponenten mit geringem Aufwand. Somit ist dieses System ideal für Forschung und Entwicklung.
Zurzeit wird ein ganzer Schwarm dieser Fluggeräte an der TUHH gebaut, welcher zum Beispiel kooperativ die Aufklärung in Katastrophengebieten erleichtern könnte.





Arduino
Einleitung
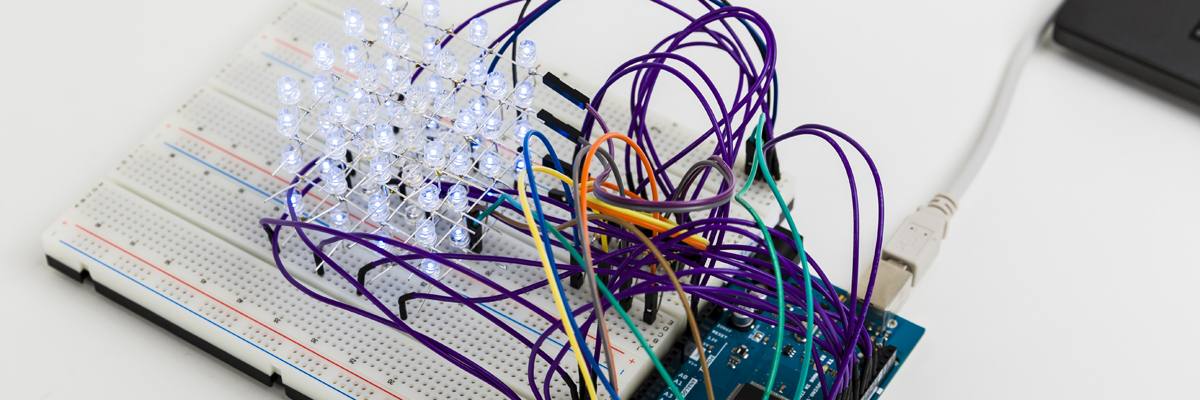
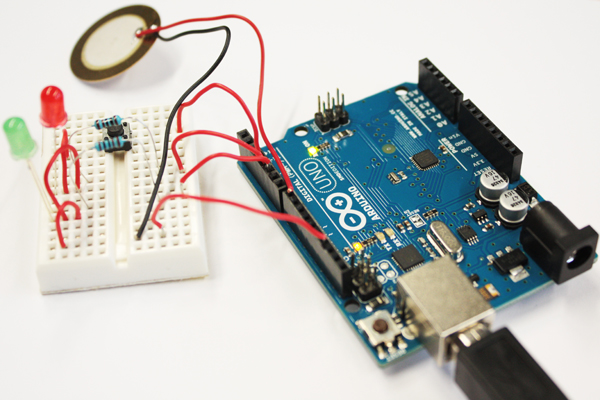
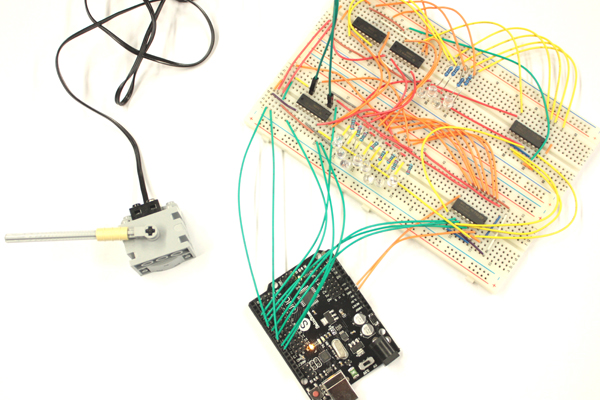
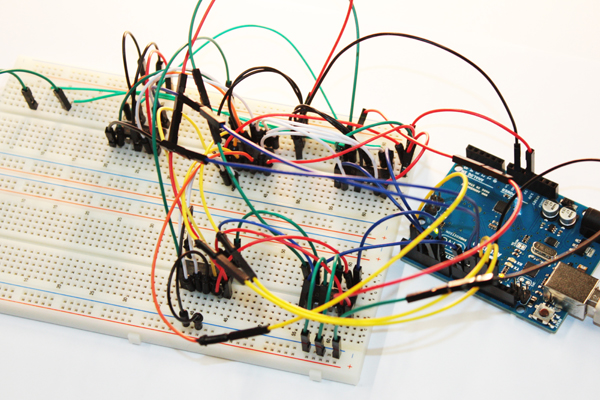
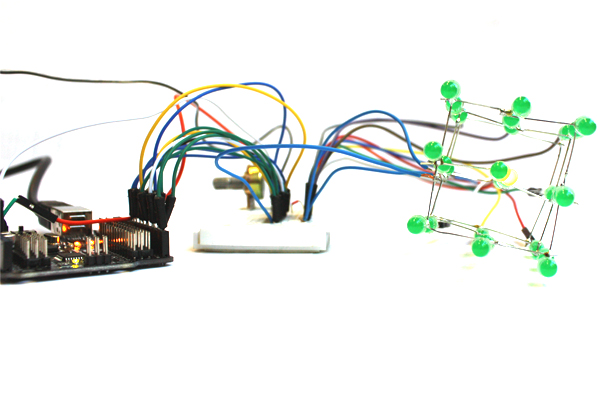
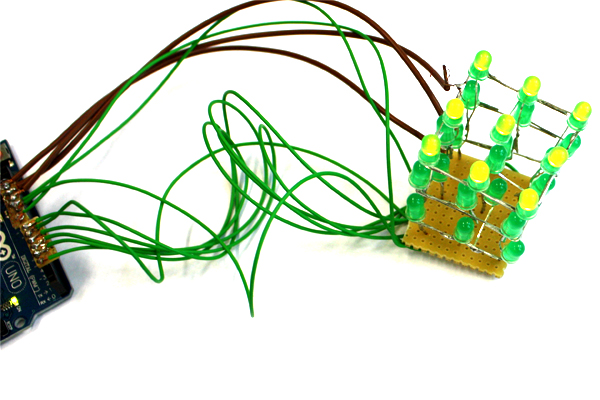
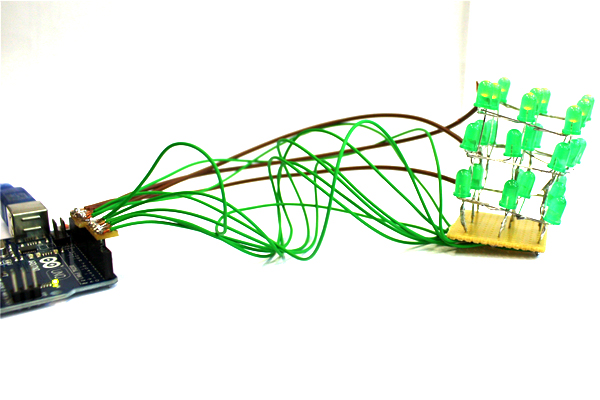
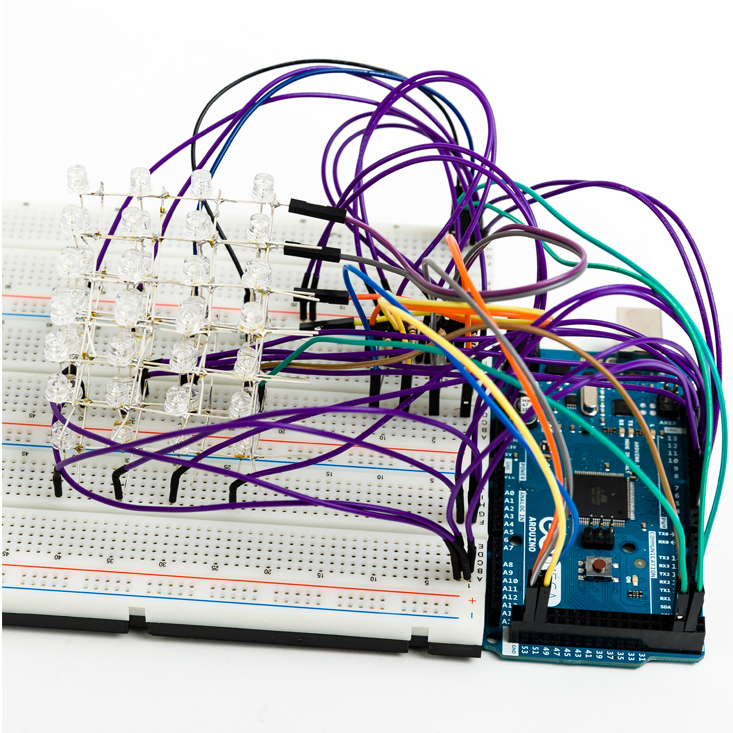
Der Arduino besteht im Wesentlichen aus einem Mikrocontroller (Atmel ATMEGA328P), der über Steckanschlüsse mit verschiedensten elektronischen Bauteilen verbunden werden kann. Er besitzt 14 digitale Ein- beziehungsweise Ausgänge, wovon sechs Pins als PWM nutzbar sind, sowie sechs analoge Eingänge. Das besondere an dem Arduino ist, dass neben dem Mikrocontroller keine Schaltungselemente vorgegeben sind. Es können eigene Schaltkreise entwickelt werden, die zum Beispiel LEDs ansteuern sollen oder auf Eingaben von Tastern reagieren sollen. Der Arduino wird mit der Progammiersprache „C“ oder „C++“ programmiert. Wichtig dabei ist, sich nicht vom freien Zusammenstecken abschrecken zu lassen. Für einen erfahrenen Bastler wie auch für einen ambitionierten Anfänger ist die Arbeit mit dem Arduino Board ein Kinderspiel. Neben einführenden Aufgaben zum Erlernen der Schaltkreisgrundlagen gibt es ausführliche Anleitungen zum Aufbau komplizierterer Schaltungen.
Technik
Der 28-polige Mikrocontroller (Atmel ATMEGA328P) mit einer Taktfrequenz von 16 MHz, 32 kByte Flash Memory und 1 kByte EEPROM bildet das "Gehirn" des Roboters (Datenblatt). Von hier aus werden alle Abläufe koordiniert. Die Eingänge (zum Beispiel Tast- oder Lichtsensoren) werden, wie bei allen Robotern, vom Mikrocontroller verarbeitet und abhängig von der Programmlogik zu Ansteuerbefehlen für die Ausgänge (Antriebe, LED) verarbeitet. Die Kommunikation mit dem Computer wird über eine USB Schnittstelle ermöglicht. Diese empfängt das Signal und leitet es an den Mikrocontroller weiter.
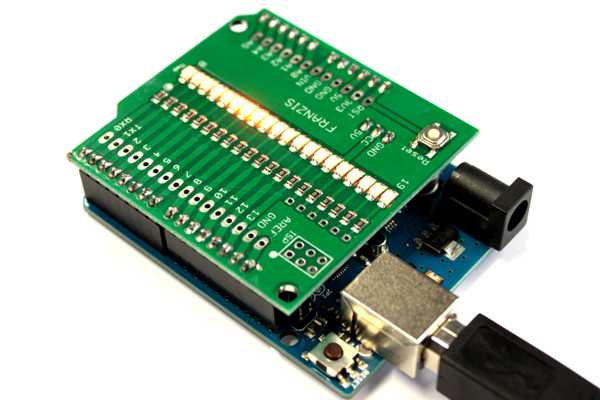
Neben den „Standardsensoren“ wie Tast- und Lichtsensoren (siehe RCX) kann man den Arduino mit verschiedenen Sensoren erweitern. Außerdem wurde ein Steckshield entwickelt, das zur Ansteuerung von sechs Motoren genutzt werden kann.





Ausstattung
- Erforderlich: Lötkolben, Lötzinn, Zange, Steckverbindungen, Steckboard und einen PC. Hinweis: Die Materialien werden von der TUHH gestellt.
Anleitung
Eine ausführliche Anleitung, Programmierhilfe sowie sonstige hilfreiche Tools sind auf der Homepage des Herstellers erhältlich (Link zum Hersteller).
Programmierung
Zur Programmierung des Arduinos wird meist die Programmiersprache „C“ verwendet. Als Programmierumgebung kommt in den TUHH-Kursen die vom Hersteller gegebene Software zum Einsatz. Diese Software wird kostenlos zur Verfügung gestellt (Download Software).
Die Programmiersprache C ist eine so genannte imperative Programmiersprache. Das heißt, dass ein Programm als definierte Folge von Befehlen nacheinander abgearbeitet wird. Objektorientierte Sprachen wie C++ und Java orientieren sich an der grundlegenden Syntax von „C“. Deshalb ist ein Erlernen dieser Sprache als Einstieg sehr sinnvoll.
Asuro-Bausatz
Einleitung
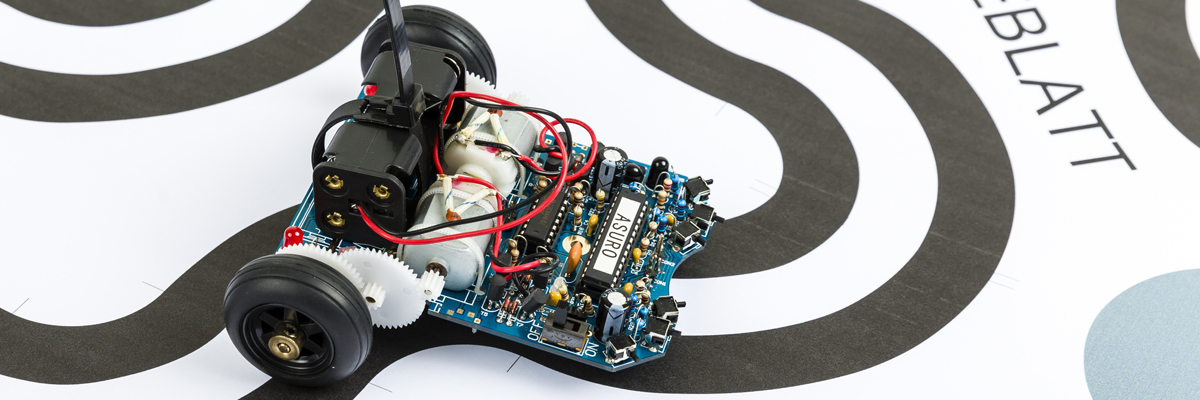
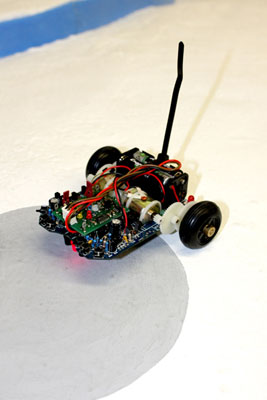
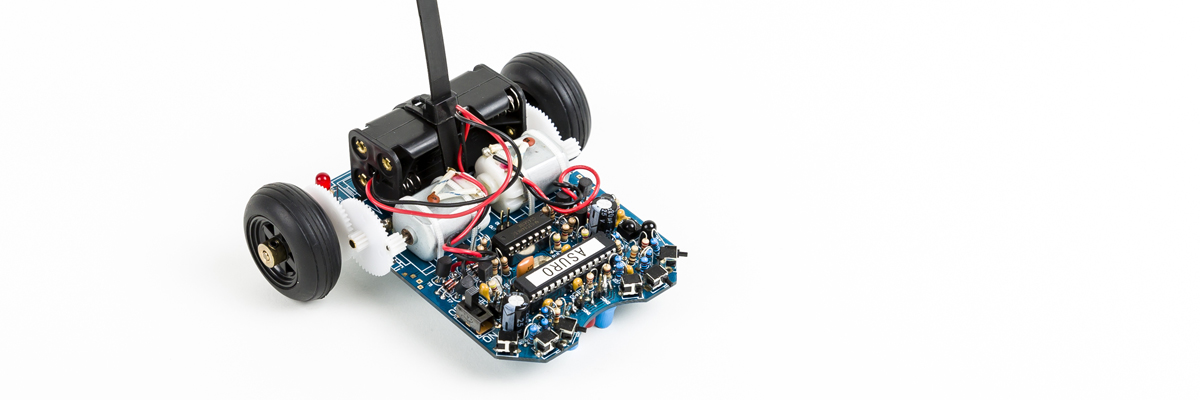
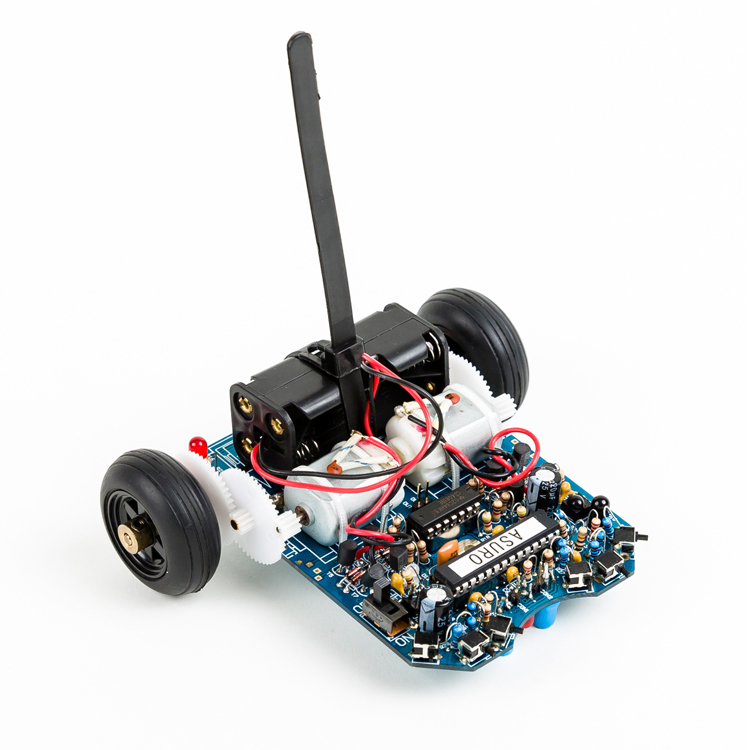
Der Asuro wurde vom Deutschen Zentrum für Luft- und Raumfahrt (kurz: DLR) entwickelt. Asuro steht für Another Small and Unique Robot from Oberpfaffenhofen (auf Deutsch: ein weiterer kleiner einzigartiger Roboter aus Oberpfaffenhofen). Er besteht aus 127 Teilen und kann gewöhnlich in 6 bis 10-stündiger Lötarbeit zusammengebaut werden. Anschließend wird der Asuro mit der Progammiersprache „C“ programmiert. Wichtig dabei ist, sich nicht vom Zusammenbau abschrecken zu lassen. Für einen erfahrenen Bastler ist die Konstruktion ein Kinderspiel, aber auch ambitionierte Anfänger sollten keine Probleme haben, da eine sehr detailreiche Lötanleitung zur Verfügung steht. Ein Bausatz kostet im Handel ca. 50 € und gehört damit zu den günstigeren Modellen in der Robotertechnik.
Technik
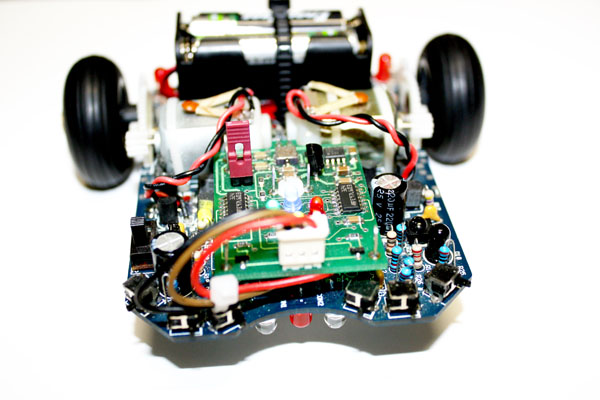
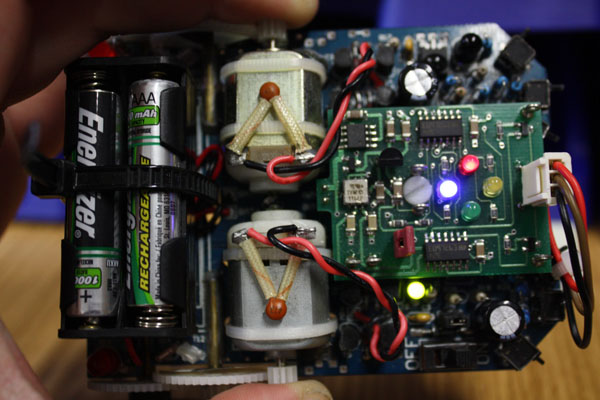
Der 28-polige Mikrocontroller (Atmel ATMEGA 8L-8Pi) mit einer Taktfrequenz von 8MHz, 8 kByte Flash Memory und 512 Byte EEPROM bildet das "Gehirn" des Roboters (Datenblatt). Von hier aus werden alle Abläufe koordiniert. Die Eingänge (zum Beispiel Tast- oder Lichtsensoren) werden, wie bei allen Robotern, vom Mikrocontroller verarbeitet und abhängig von der Programmlogik zu Ansteuerbefehlen für die Ausgänge (Antriebe, LED) verarbeitet. Die Kommunikation mit dem Computer wird über eine serielle Schnittstelle ermöglicht. Um unnötigen Kabelsalat und Steckverbindungen zu vermeiden besitzt der Asuro eine Infrarot-Schnittstelle. Über diesen Infrarot-Tranceiver wird der Programmcode zum Asuro geschickt. Dieser empfängt das Signal und leitet es an den Mikrocontroller weiter.
Neben den „Standardsensoren“ wie Tast- und Lichtsensoren (siehe RCX) kann man den Asuro mit verschiedenen Sensoren mittels einer kleinen Zusatzplatine erweitern. Um zum Beispiel die Neigung zu messen, kann man einen mehrachsigen Beschleunigungssensor mit dem Asuro verwenden. Dieser ist wegen seiner geringen Baugröße und Robustheit sehr beliebt. Bei diesen Sensoren wird eine sehr kleine träge Masse durch Beschleunigungen aus ihrer Nulllage ausgelenkt. Diese sehr kleinen Verschiebungen werden gemessen und lassen mittels des Newton’schen Kraftgesetzes F = m * a auf die Beschleunigung schließen. Bei nur langsam bewegten Körpern kann man davon ausgehen, dass die gemessene Beschleunigungsrichtung mit der Erdgravitationsrichtung übereinstimmt.
Der verwendete Beschleunigungssensor auf der Zusatzplatine ist ein zweiachsiges Modell (ADXL203) von Analog Devices mit einem Messbereich von 1,7 g (1,7-fache Erdbeschleunigung) in alle Messrichtungen (Datenblatt). Die Ausgangsspannungen des Sensors sind proportional zur gemessenen Beschleunigung, wobei in diesem Fall die Messspannung mit dem Faktor 1 V/g skaliert werden muss, um die physikalische Einheit zu berechnen.



Ausstattung
- Erforderlich: Lötkolben, Lötzinn, Zange, Metallsäge, Schmirgelpapier, Klebstoff und einen PC mit seriellem Anschuss. Hinweis: Die Materialien werden von der TUHH gestellt.
- Vorhanden: 2 Lichtsensoren, 6 Tastsensoren, 2 Lichtschranken, 2 Motoren, 4 LED, Batteriehalter für 4 AAA-Batterien, 8-Bit Mikrocontroller (ATmega8), Infrarot-Schnittstelle, Platine
- Erweiterungen: Die Licht- und Tastsensoren können beliebig ausgetauscht werden und durch andere Sensoren ersetzt werden (beispielsweise durch Lage-, Temperatur-, Ultraschall-, Schallsensoren oder eine Kamera)
Bauanleitung
Eine ausführliche Bauanleitung, Programmierhilfe sowie sonstige hilfreiche Tools sind auf der Homepage des Herstellers erhältlich (Bauanleitung).
Programmierung
Zur Programmierung des Asuros wird meist die Programmiersprache „C“ verwendet. Als Programmierumgebung kommt in den TUHH-Kursen AVR-Studio zum Einsatz. AVR-Studio wird kostenlos vom Mikrocontrollerhersteller ATMEL zur Verfügung gestellt (Download AVR-Studio).
Die Programmiersprache C ist eine so genannte imperative Programmiersprache. Das heißt, dass ein Programm als definierte Folge von Befehlen nacheinander abgearbeitet wird. Objektorientierte Sprachen wie C++ und Java orientieren sich an der grundlegenden Syntax von „C“. Deshalb ist ein Erlernen dieser Sprache als Einstieg sehr sinnvoll.
LEGO® NXT

Einleitung
Der NXT ist ein intelligenter, programmierbarer Baustein der Firma LEGO®. Der Baustein ähnelt dem RCX Baustein. Der NXT besitzt im Gegensatz zum älteren Modell (RCX) vier Ein- und drei Ausgänge. Der Stein ist das „Gehirn“ des Roboters, verfügt über einen leistungsstarken 32-Bit-Mikroprozessor, Flash Memory und unterstützt sowohl Bluetooth als auch USB 2.0.
Technik
Der Mikroprozessor (ARM7TDMI) ist ein Low-End-Modell der ARM-Familie und wird vor allem als Komponente für Handys und andere portable Kommunikations- oder Multimediageräte verwendet. Außerdem wird er im Game Boy Advance und in weiteren Nintendo-Komponenten verbaut. Die ARM-CPU ist eine RISC-Architektur (Reduced Instruction Set Computing) und kennt als solche lediglich drei Kategorien von Befehlen:
- Befehle zum Zugriff auf den Speicher (Load/Store)
- arithmetische oder logische Befehle auf Werte in Registern (UND, ODER)
- Befehle zum Ändern des Programmflusses (Sprünge, Subprogrammaufrufe)
Dies ermöglicht meist ein schnelleres Reagieren auf Unterbrechungen (Interrupts) durch externe Signale. So prädestiniert sich diese Prozessorkategorie für Aufgaben mit Echtzeitanforderungen.
Mit dem Ultraschallsensor kann der Roboter Entfernungen einschätzen und „sehen“, wo sich Gegenstände befinden. In Verbindung mit dem NXT Stein kann der Ultraschallsensor Gegenstände erkennen und den Abstand in Zoll oder Zentimeter messen.
Als Ultraschall bezeichnet man Schall mit Frequenzen, die oberhalb des vom Menschen wahrgenommenen Bereiches liegen, etwa zwischen 25 kHz und 1 GHz. Schall mit noch höherer Frequenz wird als Hyperschall bezeichnet, bei Frequenzen unterhalb des für Menschen hörbaren Frequenzbereichs spricht man dagegen von Infraschall.
Zur Erzeugung von Ultraschall in Luft eignen sich Lautsprecher (insbesondere Piezolautsprecher), d. h. membrangekoppelte Platten aus piezoelektrischem Material, die durch Umkehr des Piezo-Effekts zu Schwingungen angeregt werden.
Ultraschall in Flüssigkeiten und Festkörpern wurde früher durch Wandler erzeugt, die sich Echolote nennen. Heute verwendet man dazu Quarz- oder Keramikschwinger. An diese wird eine Wechselspannung angelegt.
Mit dem Lichtsensor kann der Roboter zwischen hell und dunkel unterscheiden und die Helligkeit in einem Raum messen bzw. die Lichtintensität verschiedener Farben bestimmen (siehe RCX).





Ausstattung
Das handelsübliche NXT-Set beinhaltet (bei uns im Kurs vorhanden):
- 519 Lego-Technik Bauteile
- Sensoren (Ultraschall-, Licht-, Tastsensoren)
- 3 Servomotoren (+ eingebauter Rotationssensor)
- USB-Kabel
- Anschlusskabel
- Erweiterungen: Infrarot-Sucher, Infrarot-Sensor, Kreisel-Sensor, Farbsensor
Programmierung
Die Programmierung des NXT kann unter anderem in der objektorientierten Programmiersprache Java erfolgen. Dafür eignet sich zum Beispiel die Entwicklungsumgebung Eclipse. Eclipse ist ein beliebtes Open-Source Projekt, welches viele hilfreiche Werkzeuge zur Programmierung bietet (Download Eclipse).
LEGO® RCX
Einleitung
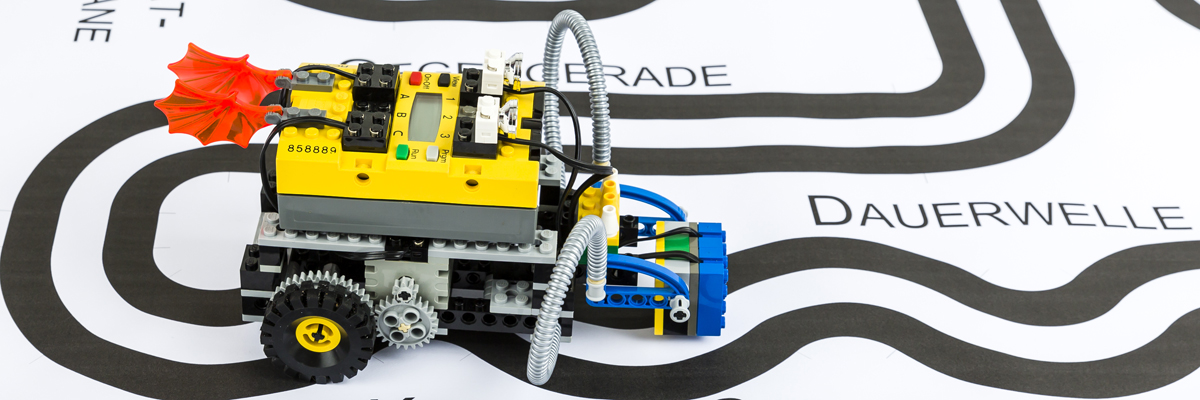
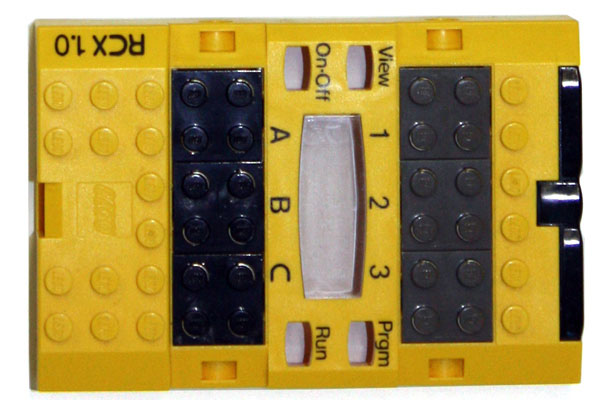
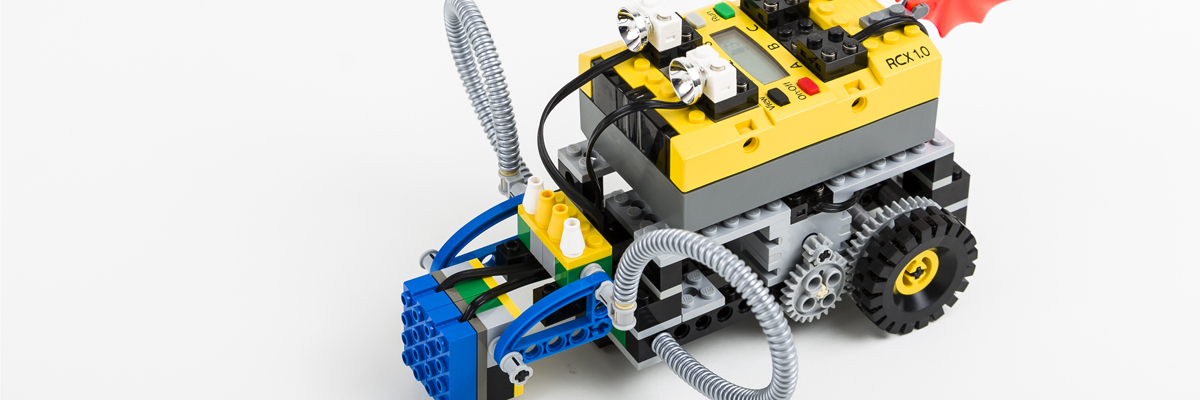
Der RCX ist ein von der Firma LEGO® und dem MIT (Massachusetts Institute of Technology) entwickelter Microcomputer der LEGO Mindstorms® Famile. RCX steht für Robotics Command System und ermöglicht den Bau von frei programmierbaren und autonomen LEGO Robotern. Er ist mit den herkömmlichen LEGO Steinen nach Belieben kombinierbar und somit ist der Umgang mit diesem System fast jedem Kind bekannt. Aufgrund der Vielzahl von LEGO Technik Bausteinen wie Zahnräder und Motoren wird den Kindern neben Spaß und Spiel auch ein großes Maß an technischem Verständnis vermittelt. Um den Roboter autonom agieren zu lassen ist eine gewisse Anzahl von Eingängen erforderlich. Diese werden durch speziell für den RCX entwickelte Sensoren wie z.B. Tast- oder Lichtsensoren ermittelt. Die Bedienung und Handhabung des RCX ist sehr intuitiv, weshalb auch für "LEGO Neulinge" der Umgang mit diesem Robotiksystem keine großen Schwierigkeiten darstellt und sich rasch erste Erfolge einstellen.
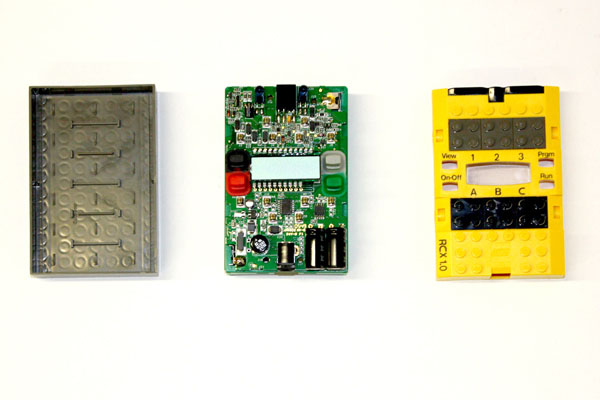
Das Design des RCX erinnert an einen großen LEGO Stein. Er besitzt ein LCD Display sowie 4 Knöpfe zum Starten und Aufrufen von verschiedenen Programmen und Funktionen. Auf der Oberseite des RCX befinden sich jeweils 3 Ein- und Ausgänge, an die Motoren und Sensoren angeschlossen werden können. Die Eingänge sind an der grauen Anschlussleiste erkennbar, wohingegen die Ausgänge eine schwarze Anschlussleiste besitzen. Die Übertragung der Programme erfolgt über eine Infrarot-Schnittstelle. Hierfür wird ein mitgelieferter Übertragungstower an einen seriellen Port oder einen USB Anschluss angeschlossen. Über ein Kabel können die Programme leider nicht auf den RCX übertragen werden. Im RCX befindet sich ein 8-Bit Mikrocomputer der Firma Renesas (Renesas-H8/300) mit einer Taktfrequenz von 16 MHz. Dieser wird beispielsweise auch in Digitalkameras verwendet. Der sogenannte Mikrocontroller (kurz: µC) besitzt 32KB externes RAM (Random Access Memory) und 16KB ROM (Read Only Memory).
Um die Umgebung zu detektieren, können unterschiedliche Sensoren verwendet werden, wie beispielsweise Berührungssensoren (auch Tastsensor oder Taster genannt) und Lichtsensoren. Zusätzlich zur Grundausstattung sind auch noch Temperaturfühler und Rotationsmesser erhältlich.
Der Berührungssensor besteht aus einem kleinen Schalter, der am Ende eines Bausteins verbaut ist. Er wird meistens im logischen Modus (An oder Aus) verwendet.
Der Lichtsensor besteht aus einer roten LED und einem Fototransistor. Die benötigte Betriebsspannung dieses Sensors wird vom RCX geliefert. Da der Lichtsensor seine eigene Lichtquelle enthält, besteht die Möglichkeit, dass von einer nahe gelegenen Oberfläche reflektierte Licht zu messen, so dass der Sensor verschiedene Helligkeit bzw. Farben unterscheiden kann. Bei Verwendung der interpretierten Programmiersprache Interactive C gibt der Sensor Werte von 0 bis 1023 (10 Bit) zurück. In der grafischen Programmierumgebung von LEGO, dem Robotics Invention System (kurz: RIS), wird die Lichtstärke in Prozent ausgegeben.



Ausstattung
Das übliche RCX-Erfinderset beinhaltet:
- 828 Elemente
- 2 Gleichstrommotoren
- Infrarot-Übertragungstower
- Sensoren (Licht- und Tastsensoren)
- Anschlusskabel
- Erweiterungen: Rotationssensor und Temperatursensor
Programmierung
Anfängern ist ein Einstieg mit der Programmierumgebung Robotics Invention System (RIS) zu empfehlen. Mit RIS kann man schnell und leicht verständlich die Grundlagen der Programmierung erlernen. Alle wichtigen Programmierelemente wie Schleifen und Abfragen sind vorhanden und können spielerisch erlernt werden. Ein videobasierter Unterricht ermöglicht einen Einstieg auf verschiedenen Niveaus. Mit verschiedenen Lektionen kann das Wissen schrittweise erweitert werden.
Alternativ wird in unseren Kursen die von robotik@TUHH entwickelte graphische Programmieroberfläche RinoLab verwendet.
Robotertechnik
Ein ausführlicher Überblick unserer eingesetzten Robotersysteme ist hier zu finden. Neben technischen Informationen sind auch Datenblätter und zahlreiche Links zu Herstellern zusammengestellt.
LEGO® RCX |
|
|
Der RCX ist das erste LEGO® Mindstorms® Robotiksystem. Der programmierbare Baustein ist mit jeweils drei Ein- und Ausgängen ausgestattet und basiert auf einem 8-Bit Mikroprozessor.
|
LEGO® NXT |
|
|
Der NXT ist die zweite Generation des LEGO® Mindstorms® Bausteins und besitzt im Vergleich zum älteren Modell (RCX) neben vier Ein- und drei Ausgängen auch einen 32-bit Prozessor sowie Bluetooth und USB2.0. |
LEGO® EV3 |
 |
|
Der EV3 ist das neuste LEGO® Mindstorms® Robotiksystem. Er ist mit mehreren Motoren und Sensoren ausgestattet. Es kann mit WiFi und Bluetooth gearbeitet werden. Der Speicherplatz kann mit einer SD Karte erweitert werden.
|
Arduino |
 |
|
Das Arduino Board ist über seine 20 Ein- und Ausgangspins für freie Projekte zu verwenden. Diverse elektronische Bauteile können angeschlossen und über den programmierbaren Mikrocontroller gesteuert werden. |
3D Druck |
|
|
Mittels eines CAD Programms können kleine Teile am Computer konstruiert und größere Projekte entwickelt werden. Anschließend werden die Teile im 3D-Drucker ausgedruckt. |
micro:bit |
|
|
Der micro:bit ist ein Mikrocontroller mit einer 5x5 Matrix, der mithilfe des Bit:Bots zu einem kleinen fahrenden Roboter wird und mit MicroPython programmiert wird
|